请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS570LC4357 大家好、
我们将 TMS570LC4357处理器用于我们的项目。 我们的要求是在主模式下配置 SPI、并与通过可用芯片选择连接的从器件建立通信。 对于此操作、我们使用在主模式下配置的 SPI3、它在4模式下使用、在该模式下、我们将与 SPI3CLK、SPI3SOMI、SPI3MISO 一起使用 SPI3_CS0。
在这里、外设时钟、即 VCLK1被配置为90MHz、而 SPICLK 被配置为400kHz。 SPI3用于8位字符长度、 启用时钟模式和时钟极性。 (使用 FMT0寄存器)。
正如参考示例中提供的那样、我们初始化 SPI3并尝试与从器件建立通信。
在这里、外设时钟、即 VCLK1被配置为90MHz、而 SPICLK 被配置为400kHz。 SPI3用于8位字符长度、 启用时钟模式和时钟极性。 (使用 FMT0寄存器)。
正如参考示例中提供的那样、我们初始化 SPI3并尝试与从器件建立通信。
我们将所有必需的引脚配置为附加 的参考代码。
我们观察 到、由于芯片选择未生效或失效、因此没有数据被发送或接收。 我们尝试探测 SPI 引脚、但未观察到数据、芯片选择持续处于高电平。
我们 还验证了 PIN_mux 配置。 我们现在陷入僵局,无法继续前进,也无法取得任何突破。
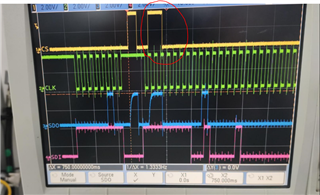
作为一项工作、我们尝试将 SPI3CS0配置为 GIO、并尝试手动将其置为有效/置为无效 以进行传输和接收。
在此期间、我们 收到了错误数据、我们怀疑 其他外部信号 会干扰所需的芯片选择。
随附的是芯片选择配置为 GIO 时的波形。 (突出显示了芯片选择的错误取消置位)
此致
Apporva
#include "HL_spi.h"
#include "HL_sys_vim.h"
/* USER CODE BEGIN (1) */
/* USER CODE END */
/** @struct g_spiPacket
* @brief globals
*
*/
static volatile struct g_spiPacket
{
spiDAT1_t g_spiDataFormat;
uint32 tx_length;
uint32 rx_length;
uint16 * txdata_ptr;
uint16 * rxdata_ptr;
SpiDataStatus_t tx_data_status;
SpiDataStatus_t rx_data_status;
} g_spiPacket_t[5U];
/** @fn void spiInit(void)
* @brief Initializes the SPI Driver
*
* This function initializes the SPI module.
*/
/* SourceId : SPI_SourceId_001 */
/* DesignId : SPI_DesignId_001 */
/* Requirements : HL_CONQ_SPI_SR7, HL_CONQ_SPI_SR8 */
void spiInit(void)
{
/* USER CODE BEGIN (2) */
/* USER CODE END */
/** @b initialize @b SPI3 */
/** bring SPI out of reset */
spiREG3->GCR0 = 0U;
spiREG3->GCR0 = 1U;
/** SPI3 master mode and clock configuration */
spiREG3->GCR1 = (spiREG3->GCR1 & 0xFFFFFFFCU) | ((uint32)((uint32)1U << 1U) /* CLOKMOD */
| 1U); /* MASTER */
/** SPI3 enable pin configuration */
spiREG3->INT0 = (spiREG3->INT0 & 0xFEFFFFFFU) | (uint32)((uint32)0U << 24U); /* ENABLE HIGHZ */
/** - Delays */
spiREG3->DELAY = (uint32)((uint32)0U << 24U) /* C2TDELAY */
| (uint32)((uint32)0U << 16U) /* T2CDELAY */
| (uint32)((uint32)0U << 8U) /* T2EDELAY */
| (uint32)((uint32)0U << 0U); /* C2EDELAY */
/** - Data Format 0 */
spiREG3->FMT0 = (uint32)((uint32)0U << 24U) /* wdelay */
| (uint32)((uint32)0U << 23U) /* parity Polarity */
| (uint32)((uint32)0U << 22U) /* parity enable */
| (uint32)((uint32)0U << 21U) /* wait on enable */
| (uint32)((uint32)0U << 20U) /* shift direction */
| (uint32)((uint32)1U << 17U) /* clock polarity */
| (uint32)((uint32)1U << 16U) /* clock phase */
| (uint32)((uint32)224U << 8U) /* baudrate prescale */
| (uint32)((uint32)8U << 0U); /* data word length */
/** - Data Format 1 */
spiREG3->FMT1 = (uint32)((uint32)0U << 24U) /* wdelay */
| (uint32)((uint32)0U << 23U) /* parity Polarity */
| (uint32)((uint32)0U << 22U) /* parity enable */
| (uint32)((uint32)0U << 21U) /* wait on enable */
| (uint32)((uint32)0U << 20U) /* shift direction */
| (uint32)((uint32)0U << 17U) /* clock polarity */
| (uint32)((uint32)0U << 16U) /* clock phase */
| (uint32)((uint32)89U << 8U) /* baudrate prescale */
| (uint32)((uint32)16U << 0U); /* data word length */
/** - Data Format 2 */
spiREG3->FMT2 = (uint32)((uint32)0U << 24U) /* wdelay */
| (uint32)((uint32)0U << 23U) /* parity Polarity */
| (uint32)((uint32)0U << 22U) /* parity enable */
| (uint32)((uint32)0U << 21U) /* wait on enable */
| (uint32)((uint32)0U << 20U) /* shift direction */
| (uint32)((uint32)0U << 17U) /* clock polarity */
| (uint32)((uint32)0U << 16U) /* clock phase */
| (uint32)((uint32)89U << 8U) /* baudrate prescale */
| (uint32)((uint32)16U << 0U); /* data word length */
/** - Data Format 3 */
spiREG3->FMT3 = (uint32)((uint32)0U << 24U) /* wdelay */
| (uint32)((uint32)0U << 23U) /* parity Polarity */
| (uint32)((uint32)0U << 22U) /* parity enable */
| (uint32)((uint32)0U << 21U) /* wait on enable */
| (uint32)((uint32)0U << 20U) /* shift direction */
| (uint32)((uint32)0U << 17U) /* clock polarity */
| (uint32)((uint32)0U << 16U) /* clock phase */
| (uint32)((uint32)89U << 8U) /* baudrate prescale */
| (uint32)((uint32)16U << 0U); /* data word length */
/** - set interrupt levels */
spiREG3->LVL = (uint32)((uint32)0U << 9U) /* TXINT */
| (uint32)((uint32)0U << 8U) /* RXINT */
| (uint32)((uint32)0U << 6U) /* OVRNINT */
| (uint32)((uint32)0U << 4U) /* BITERR */
| (uint32)((uint32)0U << 3U) /* DESYNC */
| (uint32)((uint32)0U << 2U) /* PARERR */
| (uint32)((uint32)0U << 1U) /* TIMEOUT */
| (uint32)((uint32)0U << 0U); /* DLENERR */
/** - clear any pending interrupts */
spiREG3->FLG |= 0xFFFFU;
/** - enable interrupts */
spiREG3->INT0 = (spiREG3->INT0 & 0xFFFF0000U)
| (uint32)((uint32)0U << 9U) /* TXINT */
| (uint32)((uint32)0U << 8U) /* RXINT */
| (uint32)((uint32)0U << 6U) /* OVRNINT */
| (uint32)((uint32)0U << 4U) /* BITERR */
| (uint32)((uint32)0U << 3U) /* DESYNC */
| (uint32)((uint32)0U << 2U) /* PARERR */
| (uint32)((uint32)0U << 1U) /* TIMEOUT */
| (uint32)((uint32)0U << 0U); /* DLENERR */
/** @b initialize @b SPI3 @b Port */
/** - SPI3 Port output values */
spiREG3->PC3 = (uint32)((uint32)1U << 0U) /* SCS[0] */
| (uint32)((uint32)1U << 1U) /* SCS[1] */
| (uint32)((uint32)1U << 2U) /* SCS[2] */
| (uint32)((uint32)1U << 3U) /* SCS[3] */
| (uint32)((uint32)1U << 4U) /* SCS[4] */
| (uint32)((uint32)1U << 5U) /* SCS[5] */
| (uint32)((uint32)0U << 8U) /* ENA */
| (uint32)((uint32)0U << 9U) /* CLK */
| (uint32)((uint32)0U << 10U) /* SIMO */
| (uint32)((uint32)0U << 11U); /* SOMI */
/** - SPI3 Port direction */
spiREG3->PC1 = (uint32)((uint32)1U << 0U) /* SCS[0] */
| (uint32)((uint32)1U << 1U) /* SCS[1] */
| (uint32)((uint32)1U << 2U) /* SCS[2] */
| (uint32)((uint32)1U << 3U) /* SCS[3] */
| (uint32)((uint32)1U << 4U) /* SCS[4] */
| (uint32)((uint32)1U << 5U) /* SCS[5] */
| (uint32)((uint32)0U << 8U) /* ENA */
| (uint32)((uint32)1U << 9U) /* CLK */
| (uint32)((uint32)1U << 10U) /* SIMO */
| (uint32)((uint32)0U << 11U); /* SOMI */
/** - SPI3 Port open drain enable */
spiREG3->PC6 = (uint32)((uint32)0U << 0U) /* SCS[0] */
| (uint32)((uint32)0U << 1U) /* SCS[1] */
| (uint32)((uint32)0U << 2U) /* SCS[2] */
| (uint32)((uint32)0U << 3U) /* SCS[3] */
| (uint32)((uint32)0U << 4U) /* SCS[4] */
| (uint32)((uint32)0U << 5U) /* SCS[5] */
| (uint32)((uint32)0U << 8U) /* ENA */
| (uint32)((uint32)0U << 9U) /* CLK */
| (uint32)((uint32)0U << 10U) /* SIMO */
| (uint32)((uint32)0U << 11U); /* SOMI */
/** - SPI3 Port pullup / pulldown selection */
spiREG3->PC8 = (uint32)((uint32)1U << 0U) /* SCS[0] */
| (uint32)((uint32)1U << 1U) /* SCS[1] */
| (uint32)((uint32)1U << 2U) /* SCS[2] */
| (uint32)((uint32)1U << 3U) /* SCS[3] */
| (uint32)((uint32)1U << 4U) /* SCS[4] */
| (uint32)((uint32)1U << 5U) /* SCS[5] */
| (uint32)((uint32)1U << 8U) /* ENA */
| (uint32)((uint32)1U << 9U) /* CLK */
| (uint32)((uint32)1U << 10U) /* SIMO */
| (uint32)((uint32)1U << 11U); /* SOMI */
/** - SPI3 Port pullup / pulldown enable*/
spiREG3->PC7 = (uint32)((uint32)0U << 0U) /* SCS[0] */
| (uint32)((uint32)0U << 1U) /* SCS[1] */
| (uint32)((uint32)0U << 2U) /* SCS[2] */
| (uint32)((uint32)0U << 3U) /* SCS[3] */
| (uint32)((uint32)0U << 4U) /* SCS[4] */
| (uint32)((uint32)0U << 5U) /* SCS[5] */
| (uint32)((uint32)1U << 8U) /* ENA */
| (uint32)((uint32)0U << 9U) /* CLK */
| (uint32)((uint32)0U << 10U) /* SIMO */
| (uint32)((uint32)0U << 11U); /* SOMI */
/* SPI3 set all pins to functional */
spiREG3->PC0 = (uint32)((uint32)1U << 0U) /* SCS[0] */
| (uint32)((uint32)0U << 1U) /* SCS[1] */
| (uint32)((uint32)0U << 2U) /* SCS[2] */
| (uint32)((uint32)0U << 3U) /* SCS[3] */
| (uint32)((uint32)0U << 4U) /* SCS[4] */
| (uint32)((uint32)0U << 5U) /* SCS[5] */
| (uint32)((uint32)0U << 8U) /* ENA */
| (uint32)((uint32)1U << 9U) /* CLK */
| (uint32)((uint32)1U << 10U) /* SIMO */
| (uint32)((uint32)1U << 11U); /* SOMI */
/** - Initialize TX and RX data buffer Status */
g_spiPacket_t[2U].tx_data_status = SPI_READY;
g_spiPacket_t[2U].rx_data_status = SPI_READY;
/** - Finally start SPI3 */
spiREG3->GCR1 = (spiREG3->GCR1 & 0xFEFFFFFFU) | 0x01000000U;
/* USER CODE BEGIN (3) */
/* USER CODE END */
}
/** @fn void spiSetFunctional(spiBASE_t *spi, uint32 port)
* @brief Change functional behavior of pins at runtime.
* @param[in] spi - Spi module base address
* @param[in] port - Value to write to PC0 register
*
* Change the value of the PC0 register at runtime, this allows to
* dynamically change the functionality of the SPI pins between functional
* and GIO mode.
*/
/* SourceId : SPI_SourceId_002 */
/* DesignId : SPI_DesignId_002 */
/* Requirements : HL_CONQ_SPI_SR9 */
void spiSetFunctional(spiBASE_t *spi, uint32 port)
{
/* USER CODE BEGIN (4) */
/* USER CODE END */
spi->PC0 = port;
/* USER CODE BEGIN (5) */
/* USER CODE END */
}
/** @fn uint32 spiReceiveData(spiBASE_t *spi, spiDAT1_t *dataconfig_t, uint32 blocksize, uint16 * destbuff)
* @brief Receives Data using polling method
* @param[in] spi - Spi module base address
* @param[in] dataconfig_t - Spi DAT1 register configuration
* @param[in] blocksize - number of data
* @param[in] destbuff - Pointer to the destination data (16 bit).
*
* @return flag register value.
*
* This function transmits blocksize number of data from source buffer using polling method.
*/
/* SourceId : SPI_SourceId_003 */
/* DesignId : SPI_DesignId_007 */
/* Requirements : HL_CONQ_SPI_SR14 */
uint32 spiReceiveData(spiBASE_t *spi, spiDAT1_t *dataconfig_t, uint32 blocksize, uint16 * destbuff)
{
/* USER CODE BEGIN (6) */
/* USER CODE END */
uint32 Chip_Select_Hold = (dataconfig_t->CS_HOLD) ? 0x10000000U : 0U;
uint32 WDelay = (dataconfig_t->WDEL) ? 0x04000000U : 0U;
SPIDATAFMT_t DataFormat = dataconfig_t->DFSEL;
uint8 ChipSelect = dataconfig_t->CSNR;
while(blocksize != 0U)
{
if((spi->FLG & 0x000000FFU) !=0U)
{
break;
}
if(blocksize == 1U)
{
Chip_Select_Hold = 0U;
}
/*SAFETYMCUSW 51 S MR:12.3 <APPROVED> "Needs shifting for 32-bit value" */
spi->DAT1 = ((uint32)DataFormat << 24U) |
((uint32)ChipSelect << 16U) |
(WDelay) |
(Chip_Select_Hold) |
(0x00000000U);
/*SAFETYMCUSW 28 D MR:NA <APPROVED> "Hardware status bit read check" */
while((spi->FLG & 0x00000100U) != 0x00000100U)
{
} /* Wait */
/*SAFETYMCUSW 45 D MR:21.1 <APPROVED> "Valid non NULL input parameters are only allowed in this driver" */
*destbuff = (uint16)spi->BUF;
/*SAFETYMCUSW 567 S MR:17.1,17.4 <APPROVED> "Pointer increment needed" */
destbuff++;
blocksize--;
}
/* USER CODE BEGIN (7) */
/* USER CODE END */
return (spi->FLG & 0xFFU);
}
/** @fn uint32 spiGetData(spiBASE_t *spi, spiDAT1_t *dataconfig_t, uint32 blocksize, uint16 * destbuff)
* @brief Receives Data using interrupt method
* @param[in] spi - Spi module base address
* @param[in] dataconfig_t - Spi DAT1 register configuration
* @param[in] blocksize - number of data
* @param[in] destbuff - Pointer to the destination data (16 bit).
*
* @return flag register value.
*
* This function transmits blocksize number of data from source buffer using interrupt method.
*/
/* SourceId : SPI_SourceId_004 */
/* DesignId : SPI_DesignId_008 */
/* Requirements : HL_CONQ_SPI_SR15 */
void spiGetData(spiBASE_t *spi, spiDAT1_t *dataconfig_t, uint32 blocksize, uint16 * destbuff)
{
uint32 index = (spi == spiREG1) ? 0U :((spi==spiREG2) ? 1U : ((spi==spiREG3) ? 2U:((spi==spiREG4) ? 3U:4U)));
/* USER CODE BEGIN (8) */
/* USER CODE END */
g_spiPacket_t[index].rx_length = blocksize;
g_spiPacket_t[index].rxdata_ptr = destbuff;
g_spiPacket_t[index].g_spiDataFormat = *dataconfig_t;
g_spiPacket_t[index].rx_data_status = SPI_PENDING;
spi->INT0 |= 0x0100U;
/* USER CODE BEGIN (9) */
/* USER CODE END */
}
/** @fn uint32 spiTransmitData(spiBASE_t *spi, spiDAT1_t *dataconfig_t, uint32 blocksize, uint16 * srcbuff)
* @brief Transmits Data using polling method
* @param[in] spi - Spi module base address
* @param[in] dataconfig_t - Spi DAT1 register configuration
* @param[in] blocksize - number of data
* @param[in] srcbuff - Pointer to the source data ( 16 bit).
*
* @return flag register value.
*
* This function transmits blocksize number of data from source buffer using polling method.
*/
/* SourceId : SPI_SourceId_005 */
/* DesignId : SPI_DesignId_005 */
/* Requirements : HL_CONQ_SPI_SR12 */
uint32 spiTransmitData(spiBASE_t *spi, spiDAT1_t *dataconfig_t, uint32 blocksize, uint16 * srcbuff)
{
volatile uint32 SpiBuf;
uint16 Tx_Data;
uint32 Chip_Select_Hold = (dataconfig_t->CS_HOLD) ? 0x10000000U : 0U;
uint32 WDelay = (dataconfig_t->WDEL) ? 0x04000000U : 0U;
SPIDATAFMT_t DataFormat = dataconfig_t->DFSEL;
uint8 ChipSelect = dataconfig_t->CSNR;
/* USER CODE BEGIN (10) */
/* USER CODE END */
while(blocksize != 0U)
{
if((spi->FLG & 0x000000FFU) !=0U)
{
break;
}
if(blocksize == 1U)
{
Chip_Select_Hold = 0U;
}
/*SAFETYMCUSW 45 D MR:21.1 <APPROVED> "Valid non NULL input parameters are only allowed in this driver" */
Tx_Data = *srcbuff;
spi->DAT1 = ((uint32)DataFormat << 24U) |
((uint32)ChipSelect << 16U) |
(WDelay) |
(Chip_Select_Hold) |
(uint32)Tx_Data;
/*SAFETYMCUSW 567 S MR:17.1,17.4 <APPROVED> "Pointer increment needed" */
srcbuff++;
/*SAFETYMCUSW 28 D MR:NA <APPROVED> "Hardware status bit read check" */
while((spi->FLG & 0x00000100U) != 0x00000100U)
{
} /* Wait */
SpiBuf = spi->BUF;
blocksize--;
}
/* USER CODE BEGIN (11) */
/* USER CODE END */
return (spi->FLG & 0xFFU);
}
/** @fn void spiSendData(spiBASE_t *spi, spiDAT1_t *dataconfig_t, uint32 blocksize, uint16 * srcbuff)
* @brief Transmits Data using interrupt method
* @param[in] spi - Spi module base address
* @param[in] dataconfig_t - Spi DAT1 register configuration
* @param[in] blocksize - number of data
* @param[in] srcbuff - Pointer to the source data ( 16 bit).
*
* @return flag register value.
*
* This function transmits blocksize number of data from source buffer using interrupt method.
*/
/* SourceId : SPI_SourceId_006 */
/* DesignId : SPI_DesignId_006 */
/* Requirements : HL_CONQ_SPI_SR13 */
void spiSendData(spiBASE_t *spi, spiDAT1_t *dataconfig_t, uint32 blocksize, uint16 * srcbuff)
{
uint32 index = (spi == spiREG1) ? 0U :((spi==spiREG2) ? 1U : ((spi==spiREG3) ? 2U:((spi==spiREG4) ? 3U:4U)));
/* USER CODE BEGIN (12) */
/* USER CODE END */
g_spiPacket_t[index].tx_length = blocksize;
g_spiPacket_t[index].txdata_ptr = srcbuff;
g_spiPacket_t[index].g_spiDataFormat = *dataconfig_t;
g_spiPacket_t[index].tx_data_status = SPI_PENDING;
spi->INT0 |= 0x0200U;
/* USER CODE BEGIN (13) */
/* USER CODE END */
}
/** @fn uint32 spiTransmitAndReceiveData(spiBASE_t *spi, spiDAT1_t *dataconfig_t, uint32 blocksize, uint16 * srcbuff, uint16 * destbuff)
* @brief Transmits and Receive Data using polling method
* @param[in] spi - Spi module base address
* @param[in] dataconfig_t - Spi DAT1 register configuration
* @param[in] blocksize - number of data
* @param[in] srcbuff - Pointer to the source data ( 16 bit).
* @param[in] destbuff - Pointer to the destination data ( 16 bit).
*
* @return flag register value.
*
* This function transmits and receives blocksize number of data from source buffer using polling method.
*/
/* SourceId : SPI_SourceId_007 */
/* DesignId : SPI_DesignId_009 */
/* Requirements : HL_CONQ_SPI_SR16 */
uint32 spiTransmitAndReceiveData(spiBASE_t *spi, spiDAT1_t *dataconfig_t, uint32 blocksize, uint16 * srcbuff, uint16 * destbuff)
{
uint16 Tx_Data;
uint32 Chip_Select_Hold = (dataconfig_t->CS_HOLD) ? 0x10000000U : 0U;
uint32 WDelay = (dataconfig_t->WDEL) ? 0x04000000U : 0U;
SPIDATAFMT_t DataFormat = dataconfig_t->DFSEL;
uint8 ChipSelect = dataconfig_t->CSNR;
/* USER CODE BEGIN (14) */
/* USER CODE END */
while(blocksize != 0U)
{
if((spi->FLG & 0x000000FFU) != 0U)
{
break;
}
if(blocksize == 1U)
{
Chip_Select_Hold = 0U;
}
/*SAFETYMCUSW 45 D MR:21.1 <APPROVED> "Valid non NULL input parameters are only allowed in this driver" */
Tx_Data = *srcbuff;
spi->DAT1 =((uint32)DataFormat << 24U) |
((uint32)ChipSelect << 16U) |
(WDelay) |
(Chip_Select_Hold) |
(uint32)Tx_Data;
/*SAFETYMCUSW 567 S MR:17.1,17.4 <APPROVED> "Pointer increment needed" */
srcbuff++;
/*SAFETYMCUSW 28 D MR:NA <APPROVED> "Hardware status bit read check" */
while((spi->FLG & 0x00000100U) != 0x00000100U)
{
} /* Wait */
/*SAFETYMCUSW 45 D MR:21.1 <APPROVED> "Valid non NULL input parameters are only allowed in this driver" */
*destbuff = (uint16)spi->BUF;
/*SAFETYMCUSW 567 S MR:17.1,17.4 <APPROVED> "Pointer increment needed" */
destbuff++;
blocksize--;
}
/* USER CODE BEGIN (15) */
/* USER CODE END */
return (spi->FLG & 0xFFU);
}
/* USER CODE BEGIN (16) */
/* USER CODE END */
/** @fn void spiSendAndGetData(spiBASE_t *spi, spiDAT1_t *dataconfig_t, uint32 blocksize, uint16 * srcbuff, uint16 * destbuff)
* @brief Initiate SPI Transmits and receive Data using Interrupt mode.
* @param[in] spi - Spi module base address
* @param[in] dataconfig_t - Spi DAT1 register configuration
* @param[in] blocksize - number of data
* @param[in] srcbuff - Pointer to the source data ( 16 bit).
* @param[in] destbuff - Pointer to the destination data ( 16 bit).
*
* Initiate SPI Transmits and receive Data using Interrupt mode..
*/
/* SourceId : SPI_SourceId_008 */
/* DesignId : SPI_DesignId_010 */
/* Requirements : HL_CONQ_SPI_SR17 */
void spiSendAndGetData(spiBASE_t *spi, spiDAT1_t *dataconfig_t, uint32 blocksize, uint16 * srcbuff, uint16 * destbuff)
{
/* USER CODE BEGIN (17) */
/* USER CODE END */
uint32 index = (spi == spiREG1) ? 0U :((spi==spiREG2) ? 1U : ((spi==spiREG3) ? 2U:((spi==spiREG4) ? 3U:4U)));
g_spiPacket_t[index].tx_length = blocksize;
g_spiPacket_t[index].rx_length = blocksize;
g_spiPacket_t[index].txdata_ptr = srcbuff;
g_spiPacket_t[index].rxdata_ptr = destbuff;
g_spiPacket_t[index].g_spiDataFormat = *dataconfig_t;
g_spiPacket_t[index].tx_data_status = SPI_PENDING;
g_spiPacket_t[index].rx_data_status = SPI_PENDING;
spi->INT0 |= 0x0300U;
/* USER CODE BEGIN (18) */
/* USER CODE END */
}
/** @fn SpiDataStatus_t SpiTxStatus(spiBASE_t *spi)
* @brief Get the status of the SPI Transmit data block.
* @param[in] spi - Spi module base address
*
* @return Spi Transmit block data status.
*
* Get the status of the SPI Transmit data block.
*/
/* SourceId : SPI_SourceId_009 */
/* DesignId : SPI_DesignId_013 */
/* Requirements : HL_CONQ_SPI_SR20 */
SpiDataStatus_t SpiTxStatus(spiBASE_t *spi)
{
/* USER CODE BEGIN (19) */
/* USER CODE END */
uint32 index = (spi == spiREG1) ? 0U :((spi==spiREG2) ? 1U : ((spi==spiREG3) ? 2U:((spi==spiREG4) ? 3U:4U)));
return(g_spiPacket_t[index].tx_data_status);
}
/* USER CODE BEGIN (20) */
/* USER CODE END */
/** @fn SpiDataStatus_t SpiRxStatus(spiBASE_t *spi)
* @brief Get the status of the SPI Receive data block.
* @param[in] spi - Spi module base address
*
* @return Spi Receive block data status.
*
* Get the status of the SPI Receive data block.
*/
/* SourceId : SPI_SourceId_010 */
/* DesignId : SPI_DesignId_014 */
/* Requirements : HL_CONQ_SPI_SR21 */
SpiDataStatus_t SpiRxStatus(spiBASE_t *spi)
{
/* USER CODE BEGIN (21) */
/* USER CODE END */
uint32 index = (spi == spiREG1) ? 0U :((spi==spiREG2) ? 1U : ((spi==spiREG3) ? 2U:((spi==spiREG4) ? 3U:4U)));
return(g_spiPacket_t[index].rx_data_status);
}
/* USER CODE BEGIN (22) */
/* USER CODE END */
/** @fn void spiEnableLoopback(spiBASE_t *spi, loopBackType_t Loopbacktype)
* @brief Enable Loopback mode for self test
* @param[in] spi - spi module base address
* @param[in] Loopbacktype - Digital or Analog
*
* This function enables the Loopback mode for self test.
*/
/* SourceId : SPI_SourceId_011 */
/* DesignId : SPI_DesignId_011 */
/* Requirements : HL_CONQ_SPI_SR18 */
void spiEnableLoopback(spiBASE_t *spi, loopBackType_t Loopbacktype)
{
/* USER CODE BEGIN (23) */
/* USER CODE END */
/* Clear Loopback incase enabled already */
spi->IOLPKTSTCR = 0U;
/* Enable Loopback either in Analog or Digital Mode */
spi->IOLPKTSTCR = (uint32)0x00000A00U
| (uint32)((uint32)Loopbacktype << 1U);
/* USER CODE BEGIN (24) */
/* USER CODE END */
}
/* USER CODE BEGIN (25) */
/* USER CODE END */
/** @fn void spiDisableLoopback(spiBASE_t *spi)
* @brief Enable Loopback mode for self test
* @param[in] spi - spi module base address
*
* This function disable the Loopback mode.
*/
/* SourceId : SPI_SourceId_012 */
/* DesignId : SPI_DesignId_012 */
/* Requirements : HL_CONQ_SPI_SR19 */
void spiDisableLoopback(spiBASE_t *spi)
{
/* USER CODE BEGIN (26) */
/* USER CODE END */
/* Disable Loopback Mode */
spi->IOLPKTSTCR = 0x00000500U;
/* USER CODE BEGIN (27) */
/* USER CODE END */
}
/* USER CODE BEGIN (28) */
/* USER CODE END */
/** @fn spiEnableNotification(spiBASE_t *spi, uint32 flags)
* @brief Enable interrupts
* @param[in] spi - spi module base address
* @param[in] flags - Interrupts to be enabled, can be ored value of:
*/
/* SourceId : SPI_SourceId_013 */
/* DesignId : SPI_DesignId_003 */
/* Requirements : HL_CONQ_SPI_SR10 */
void spiEnableNotification(spiBASE_t *spi, uint32 flags)
{
/* USER CODE BEGIN (29) */
/* USER CODE END */
spi->INT0 = (spi->INT0 & 0xFFFF0000U) | flags;
/* USER CODE BEGIN (30) */
/* USER CODE END */
}
/* USER CODE BEGIN (31) */
/* USER CODE END */
/** @fn spiDisableNotification(spiBASE_t *spi, uint32 flags)
* @brief Enable interrupts
* @param[in] spi - spi module base address
* @param[in] flags - Interrupts to be enabled, can be ored value of:
*/
/* SourceId : SPI_SourceId_014 */
/* DesignId : SPI_DesignId_004 */
/* Requirements : HL_CONQ_SPI_SR11 */
void spiDisableNotification(spiBASE_t *spi, uint32 flags)
{
/* USER CODE BEGIN (32) */
/* USER CODE END */
spi->INT0 = (spi->INT0 & (~(flags)));
/* USER CODE BEGIN (33) */
/* USER CODE END */
}
/** @fn void spi3GetConfigValue(spi_config_reg_t *config_reg, config_value_type_t type)
* @brief Get the initial or current values of the configuration registers
*
* @param[in] *config_reg: pointer to the struct to which the initial or current
* value of the configuration registers need to be stored
* @param[in] type: whether initial or current value of the configuration registers need to be stored
* - InitialValue: initial value of the configuration registers will be stored
* in the struct pointed by config_reg
* - CurrentValue: initial value of the configuration registers will be stored
* in the struct pointed by config_reg
*
* This function will copy the initial or current value (depending on the parameter 'type')
* of the configuration registers to the struct pointed by config_reg
*
*/
/* SourceId : SPI_SourceId_017 */
/* DesignId : SPI_DesignId_015 */
/* Requirements : HL_CONQ_SPI_SR26 */
void spi3GetConfigValue(spi_config_reg_t *config_reg, config_value_type_t type)
{
if (type == InitialValue)
{
config_reg->CONFIG_GCR1 = SPI3_GCR1_CONFIGVALUE;
config_reg->CONFIG_INT0 = SPI3_INT0_CONFIGVALUE;
config_reg->CONFIG_LVL = SPI3_LVL_CONFIGVALUE;
config_reg->CONFIG_PC0 = SPI3_PC0_CONFIGVALUE;
config_reg->CONFIG_PC1 = SPI3_PC1_CONFIGVALUE;
config_reg->CONFIG_PC6 = SPI3_PC6_CONFIGVALUE;
config_reg->CONFIG_PC7 = SPI3_PC7_CONFIGVALUE;
config_reg->CONFIG_PC8 = SPI3_PC8_CONFIGVALUE;
config_reg->CONFIG_DELAY = SPI3_DELAY_CONFIGVALUE;
config_reg->CONFIG_FMT0 = SPI3_FMT0_CONFIGVALUE;
config_reg->CONFIG_FMT1 = SPI3_FMT1_CONFIGVALUE;
config_reg->CONFIG_FMT2 = SPI3_FMT2_CONFIGVALUE;
config_reg->CONFIG_FMT3 = SPI3_FMT3_CONFIGVALUE;
}
else
{
/*SAFETYMCUSW 134 S MR:12.2 <APPROVED> "LDRA Tool issue" */
config_reg->CONFIG_GCR1 = spiREG3->GCR1;
config_reg->CONFIG_INT0 = spiREG3->INT0;
config_reg->CONFIG_LVL = spiREG3->LVL;
config_reg->CONFIG_PC0 = spiREG3->PC0;
config_reg->CONFIG_PC1 = spiREG3->PC1;
config_reg->CONFIG_PC6 = spiREG3->PC6;
config_reg->CONFIG_PC7 = spiREG3->PC7;
config_reg->CONFIG_PC8 = spiREG3->PC8;
config_reg->CONFIG_DELAY = spiREG3->DELAY ;
config_reg->CONFIG_FMT0 = spiREG3->FMT0;
config_reg->CONFIG_FMT1 = spiREG3->FMT1;
config_reg->CONFIG_FMT2 = spiREG3->FMT2;
config_reg->CONFIG_FMT3 = spiREG3->FMT3;
}
}