

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C1294NCPDT 您好!
我之所以给您写信是因为您对勘误文档(www.ti.com/.../spmz850g.pdf)中 TM4C1294NCPDTT3R 或 POP#09的使用有疑问。
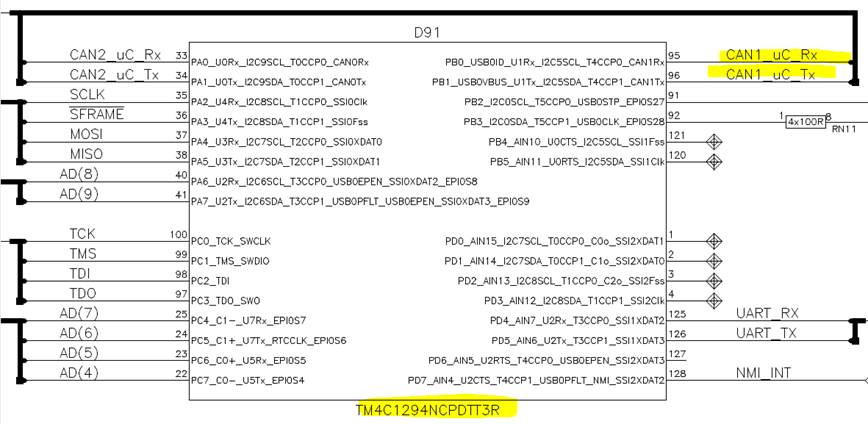
遗憾的是、我们依赖于两个引脚 PB0和 PB1。
第一个想法是使用 C-R-C 网络提供输出、以便边沿陡度始终大于>2ns。
但我们并不相信这个解决方案、因为勘误表文档建议"不要使用 PB0和 PB1"作为权变措施、而不是这个简单的解决方案。
您能否了解 C-R-C 网络是否是可靠的解决方案?
是否已经有其他设计的实施和经验?
谢谢
Fred
