Other Parts Discussed in Thread: EK-TM4C1294XL
Thread 中讨论的其他器件:EK-TM4C1294XL、 TM4C123
大家好、
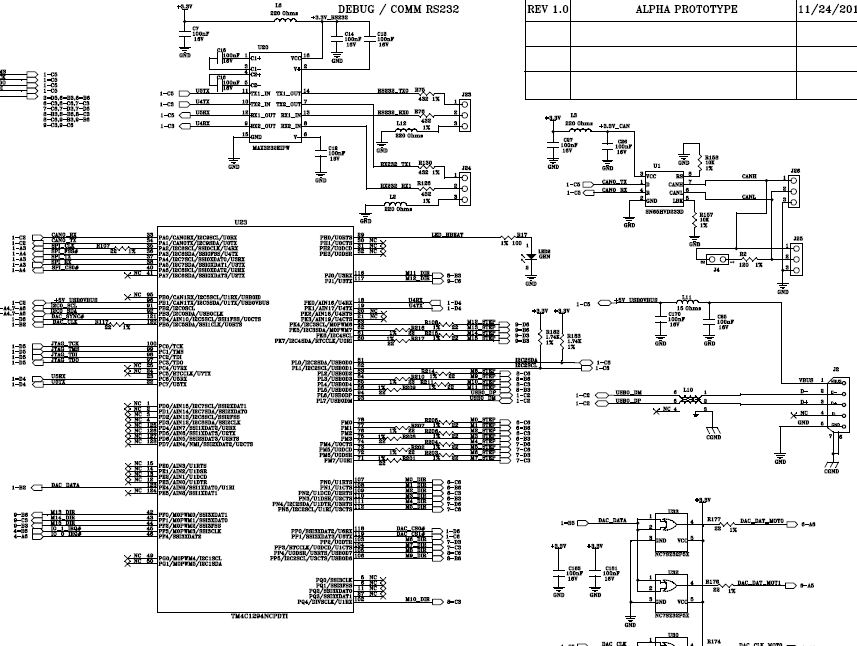
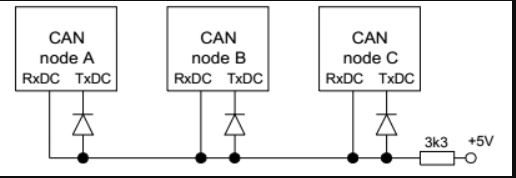
我有两个几乎相同的板、使用几乎相同的内核。 它们通过 CAN 总线进行通信
我只有其中一个发生 CAN 总线错误。 我确保它不是单板问题:它在整个5批中重复出现。
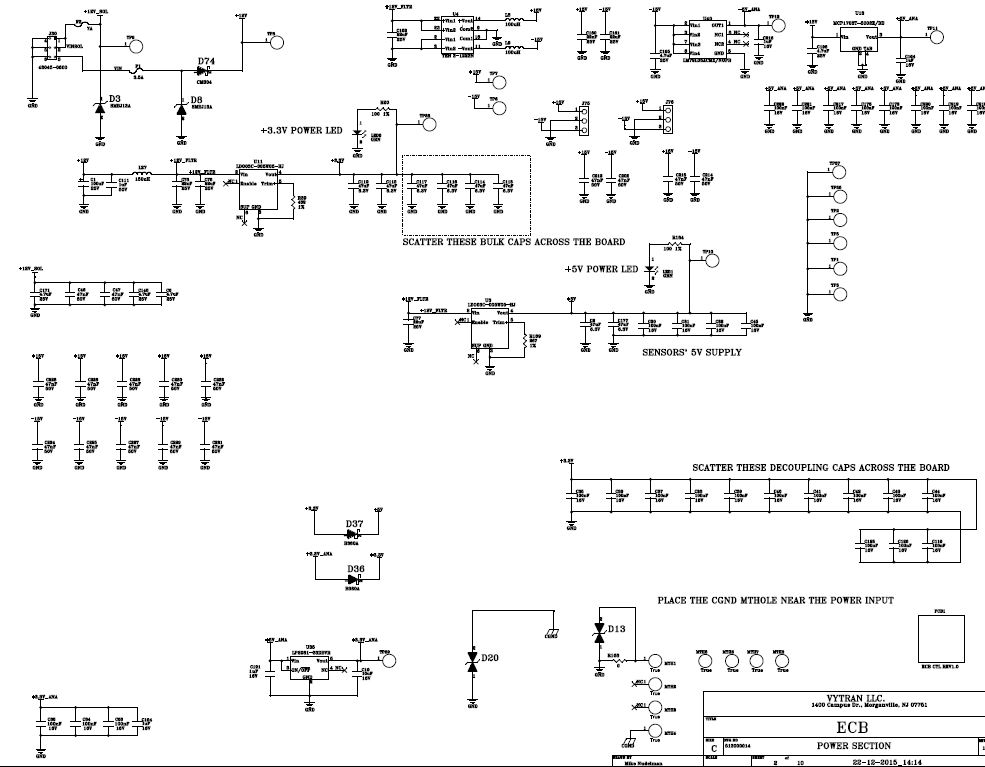
两个电路板都使用 Artesyn DC-DC POL 12V/3.3V 转换器来实现 VDD、3A 功能单元。
这种解决方案似乎可以正常工作、它具有一个单独衍生的 VDDA、由通过隔离式 POL 运行的外部12V 电源、然后是5V LDO、再是3.3V LDO。 (如果芯片想锁定、我在 VDD 和 VDDA 之间确实有一个二极管)。
有问题的解决方案具有连接到 VDD 和 VDDA 的相同3.3V 总线、这种情况并不少见。
我决定将电路板中的两个正常工作的电压短路(电压是独立产生的)、并且开始出现完全相同的问题。
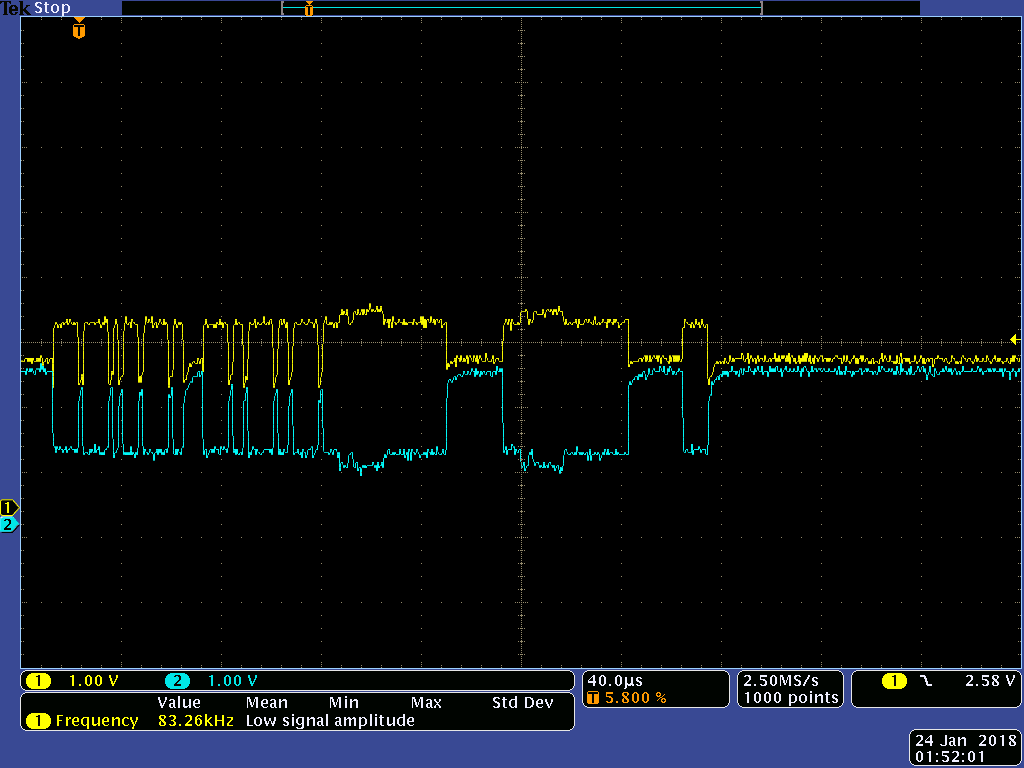
电路板的其余部分似乎正常工作、代码运行正常、直到发生 CAN 通信、此时它发出错误信号。
此问题仅在下电上电后出现:最初、当通过调试器对电路板进行编程而不进行下电上电时、其工作正常。
在应用报告 SPMA056–2013年10月的《Tiva C 系列微控制器 TM4C129x 系列的系统设计指南》中,我有以下内容不确定是否完全理解:
C 系列微控制器 TM4C129x 系列的系统设计指南》中,我有以下内容不确定是否完全理解:
3.4.1微控制器电源。
'连接到 VDD 的电源必须能够适应短暂的额外浪涌时间(40μSec μ s 至60μSec μ s)
连接到 VDDC 轨上 LDO 的去耦电容器充电至时产生的电流
VDDC 电压电平。 内部电路将浪涌限制为的数据表中指定的 IINRUSH (最大值)
部件。 连接到 VDD 的电源可以将其提供的电流自限制在小于的值
最大 IINRUSH、但这会延长使 VDDC 上升到工作电压所需的时间。"
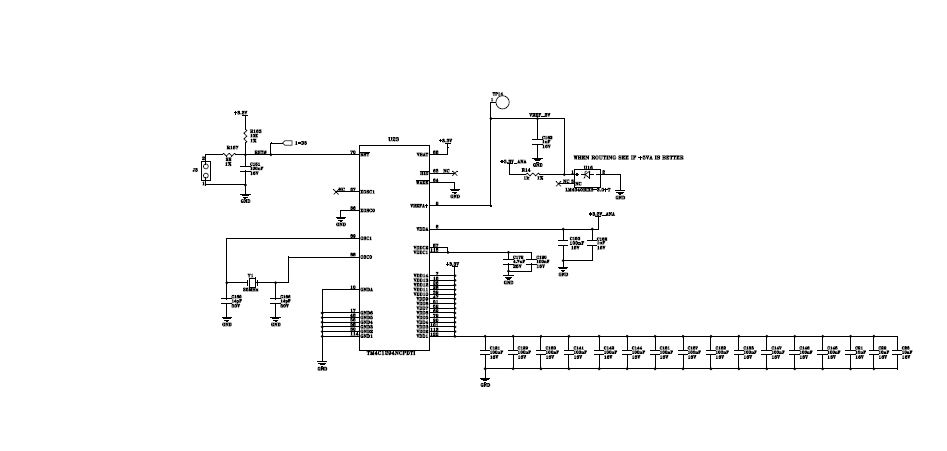
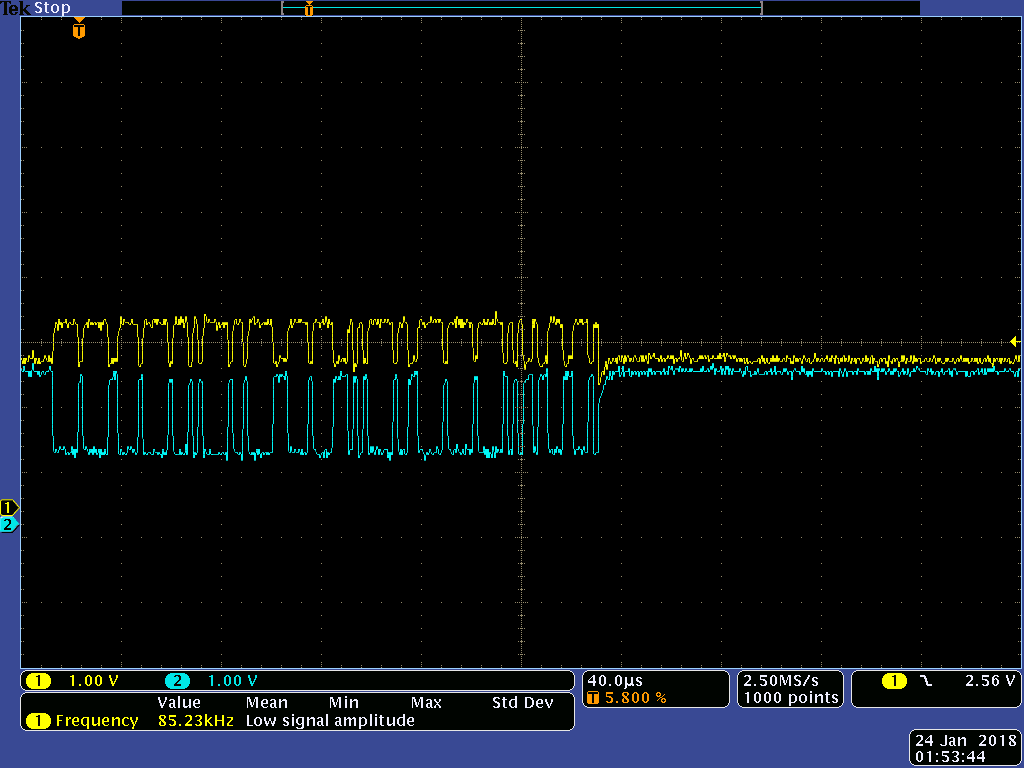
这是具有相同 VDD/AVDD 的电路板设置。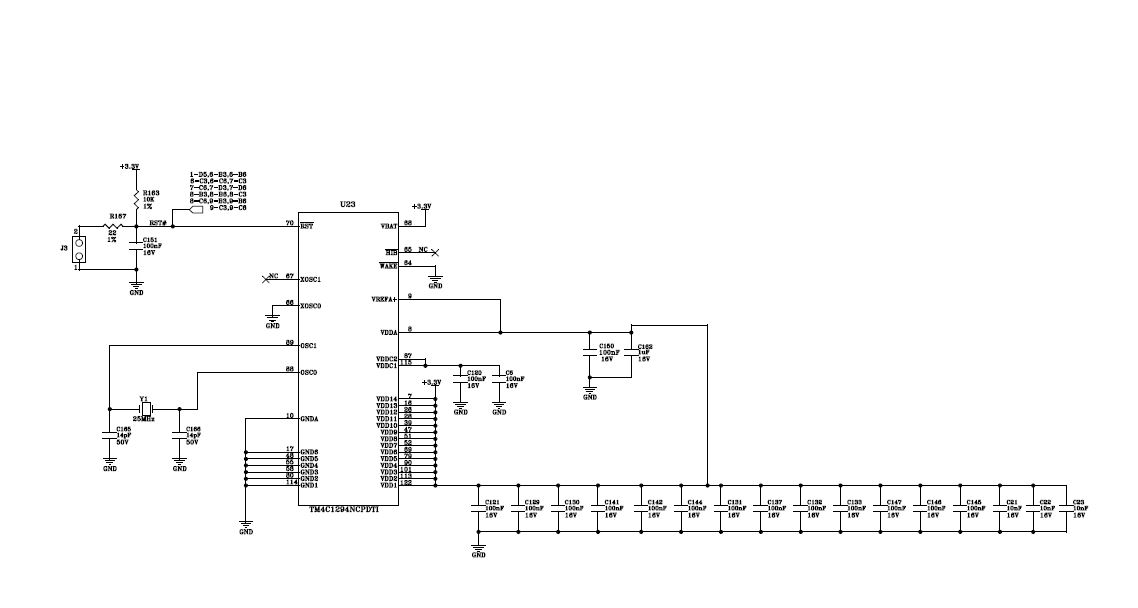
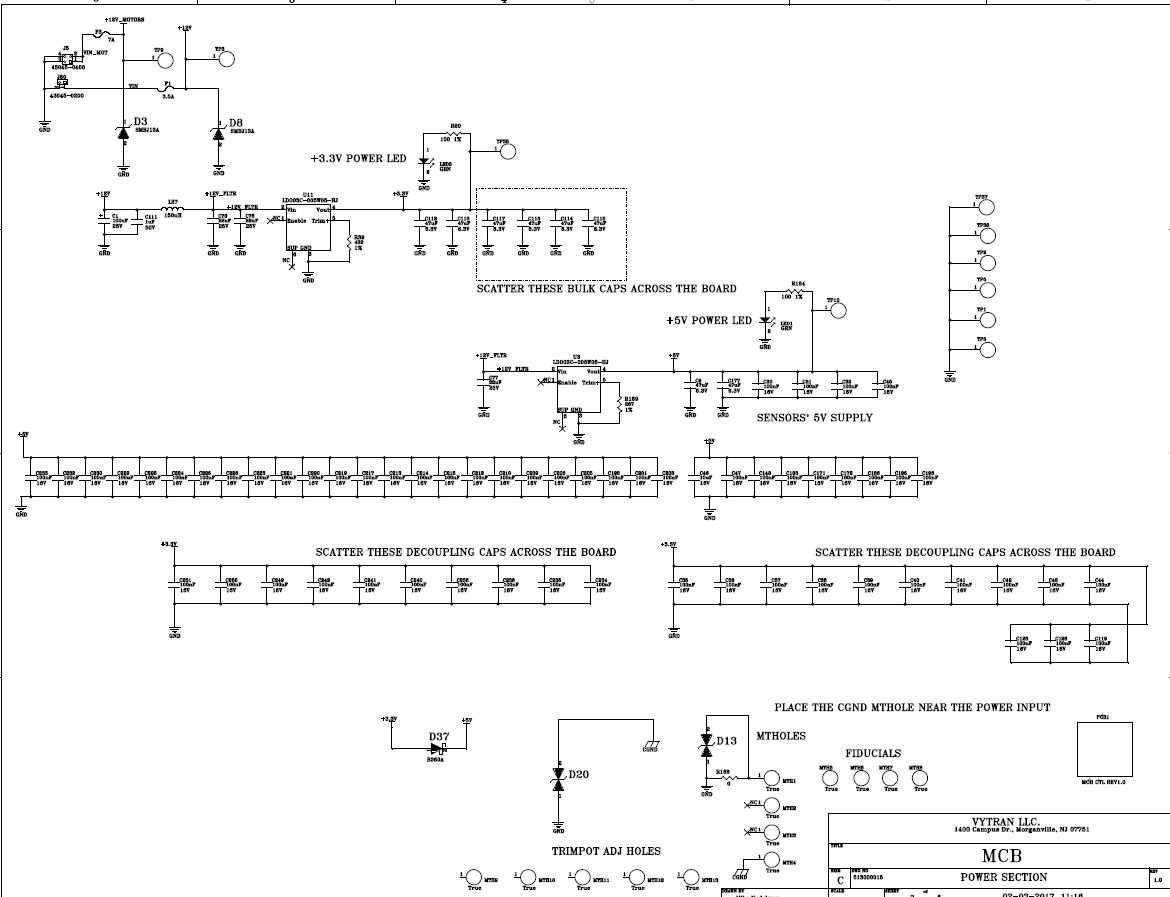
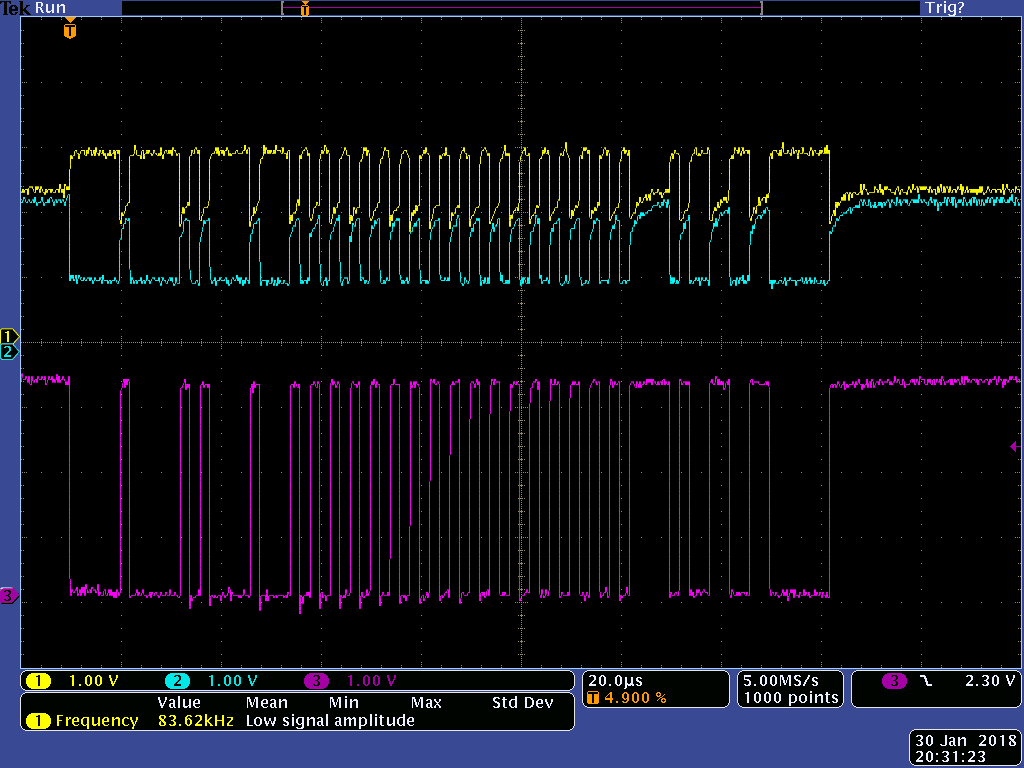
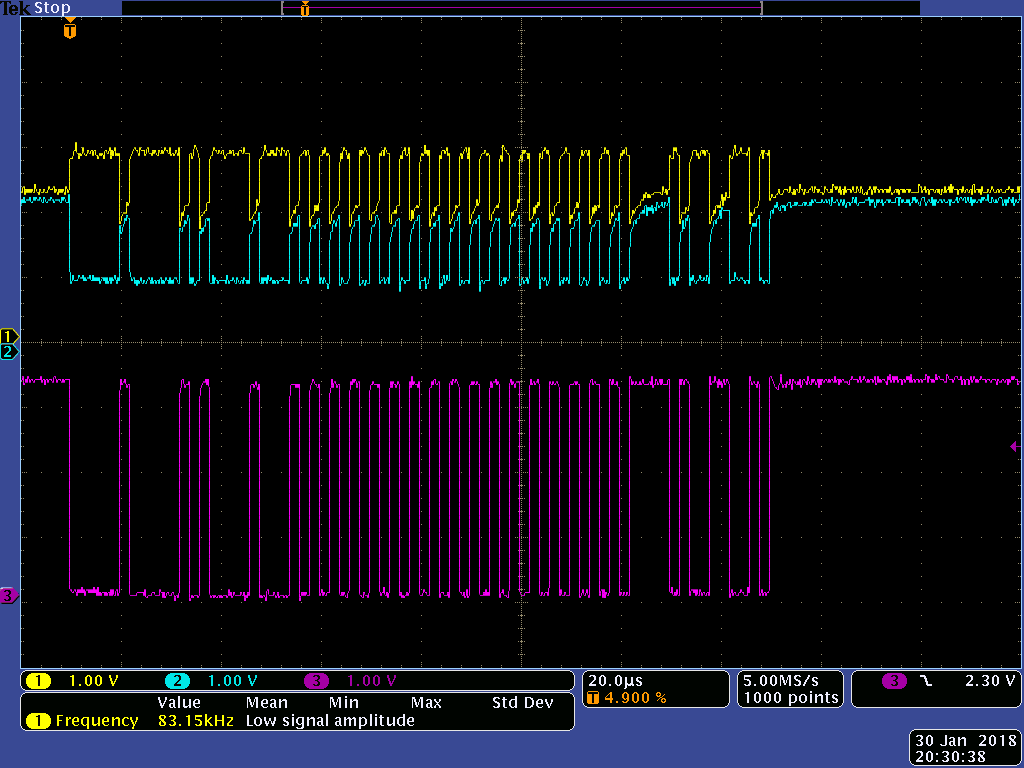
这是具有单独 VDD/AVDD 的设置