Other Parts Discussed in Thread: TM4C123GH6PM, SN65HVD230
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C123GH6PM 主题中讨论的其他器件: DK-TM4C123G、 SN65HVD230、 TM4C123
工具/软件:Code Composer Studio
您好!
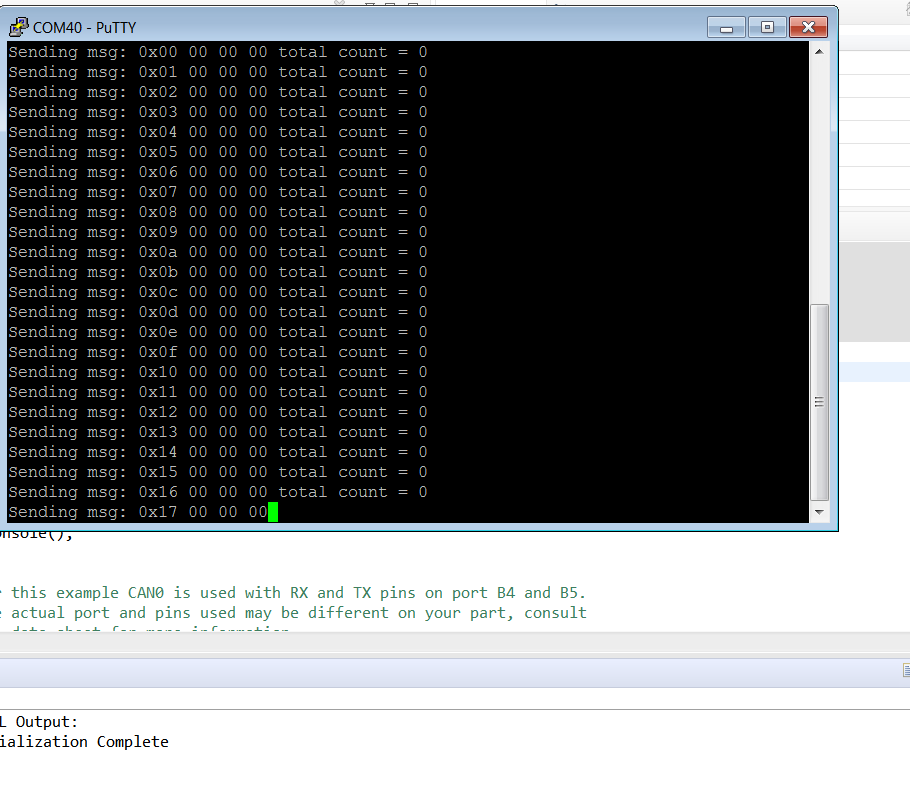
我使用2个 TM4C123GH6PM 电路板以及 两个电路板的 CAN0和 UART0。 我已经从 DK-TM4C123G 中获取了 CAN 总线示例
电路板示例。 我删除了 LCD 器件、因为我的测试不需要此器件。
我使用具有 IC SN65HVD230的2 CJMCU-30收发器。
我根本没有获得输出。
我已经检查了硬件连接、它们是正确的、代码也是无错误的
正确调试。
我已经更改了 CAN0引脚、但也没有得到
输出。
请帮助我找到解决此问题的方法