请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:RM46L852 主题中讨论的其他器件:HALCOGEN、 TMS570LC4357
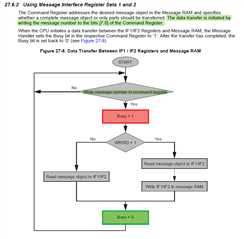
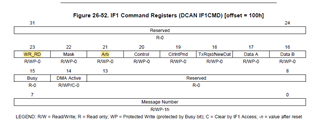
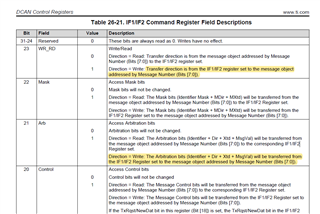
我在尝试了解 IF2CMD 寄存器;更确切地说是 消息编号 来实现。
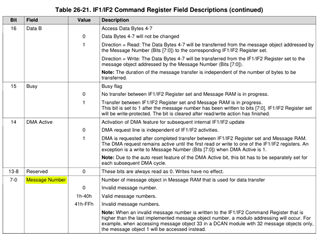
我不知道在哪里找到如何解码文档中此字段中的值。
例如、为了初始化一个消息框、HalCoGen 使用:
canREG2->IF2CMD = (uint8) 0xF8U;
为了更新 ID、HalCoGen 使用
node->IF2CMD = 0xA0U;
这些位的完整描述是什么?
如何配置 If2CMD 寄存器来修改 IF2ARB 位以启用 ISR?
此致、
加布里埃尔