Other Parts Discussed in Thread: TMS570LC4357, TMS570LS3137, HALCOGEN
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS570LS3137 主题中讨论的其他器件:TMS570LC4357、 HALCOGEN
您好
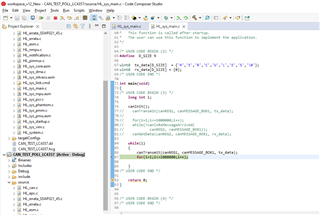
我已将 CAN 总线波特率配置为
can1939_init (canREG1、2、bus_rate、fcpu、1);
实现
#define BUS_RATE 125 /*波特率[Kbits/sec] del bus */
#define FCPU 180 /*频率 CPU EST (180MHz)*/
和 CAN 总线工作正常。
我尝试了一个更快的波特率(250,1000 ),但我不能有工作。
你有什么建议吗?
谢谢
法比奥