请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C1294NCPDT 主题中讨论的其他器件:TMP117、 INA233、 TM4C1230H6PM
您好!
在传感器论坛上重新发布、因为它似乎没有获得太多关注。
(使用 TM4C1294NCPDTI3与 TMP117通信)。
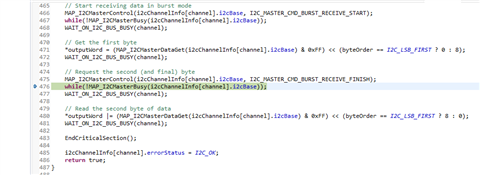
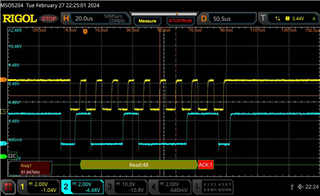
我遇到了 I2C 问题、其中的 i2c 线似乎卡住。 它卡在的状态是 CLK 保持高电平而数据保持低电平。
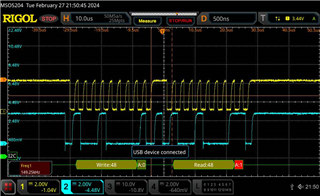
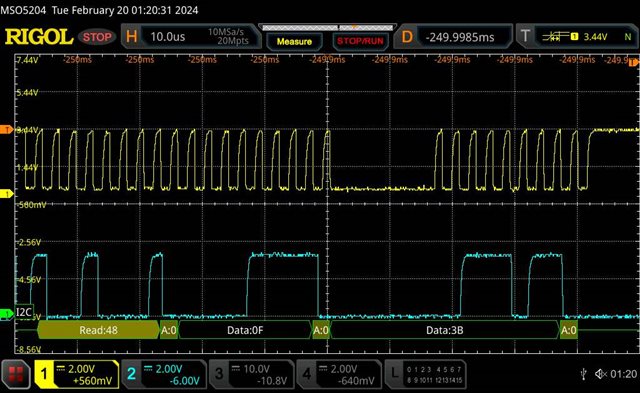
在写入配置寄存器(01h)并读回16位响应后、一直发生这种情况。 在我从示波器获取的屏幕截图中、似乎数据值正在浏览、但从主站获取 NACK 和 STOP 条件似乎有问题。 导致该故障的原因是什么、或者如何避免它? 这个问题是非常不一致的。
需要注意的其他事项是 i2c 总线上的4个 INA233、一个 ADXL355BEZ 加速计以及这个 TMP117温度传感器。
在所有故障中、温度传感器始终是保持线路的外设。
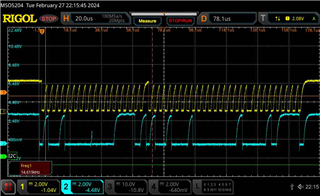
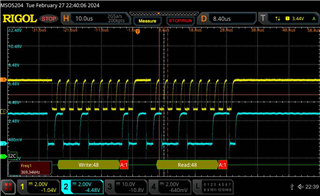
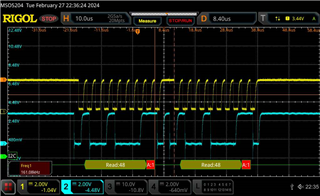
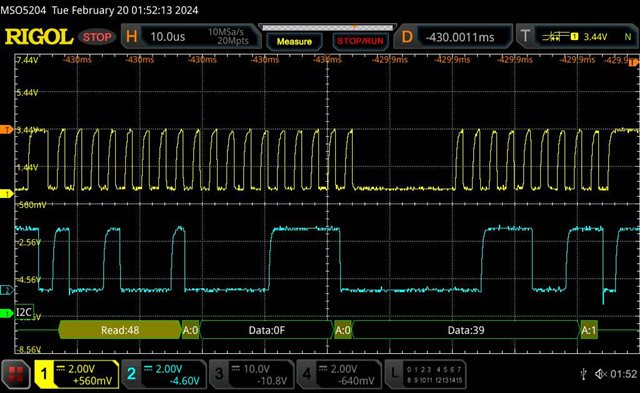
黄色表示 CLK
蓝色表示数据
请参阅故障波形:
这是循环早期的成功事务:
任何想法或建议都将对您有所帮助