主题中讨论的其他器件:MSP432E401Y、 SysConfig
大家好!
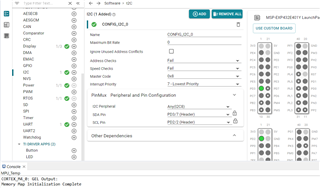
我刚刚为 MSP432E401Y 编写了 C 代码、以从 MPU6050传感器读取数据。 生成代码并刷写、没有错误。
我按如下方式将 MPU6050直接配置为支持 I2C 的 MSP432E401Y:
VCC --V3V
GND ----- 接地
SCL -------- 项目2
SDA ----------------------------------------------------- 项目3
我使用 PuTTY 进行 UART 显示
它应该显示加速计、陀螺仪和温度、 但遗憾的是、我没有看到任何显示结果
以下是代码的某些部分、用于显示有关传感器数据的信息。
// I2C 配置
I2C_Params_init (&mpu6050Params);
mpu6050Params.bitrate = I2C_400kHz;
mpu6050Params.transferMode = I2C_MODE_BLOCKING;
mpu6050Handle = I2C_open (CONFIG_I2C_0、&mpu6050Params);
MPU6050_Reset ();
while (1)
{
MPU6050_ReadData (accel_data、gyro_data、&temperature);
//在 UART 上显示传感器数据
display_print3 (uartHandle、0、0、"Accelerometer X_axis=%d Y_axis=%d Z_axis=%d\r\n"、accel_data[0]、accel_data[1]、accel_data[2]);
Display_print3 (uartHandle、1、0、"Gyroscope X_axis=%d Y_axis=%d Z_axis=%d\r\n"、gyro_data[0]、gyro_data[1]、gyro_data[2]);
Display_printf (uartHandle、2、0、"Temperature =%.2f°C\r\n "、(float)(temperature /340.0)+ 36.53);
//睡眠时间较短(根据需要调整)
usleep (100000);//睡眠100,000微秒(0.1秒)
}
}