

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS570LC4357 您好,
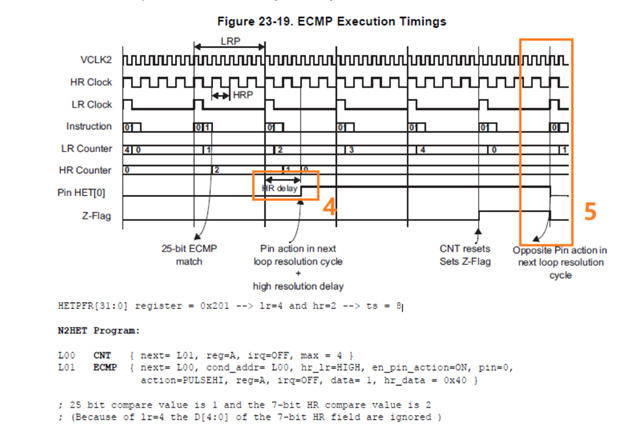
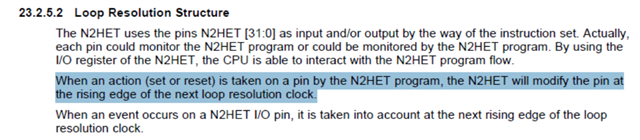
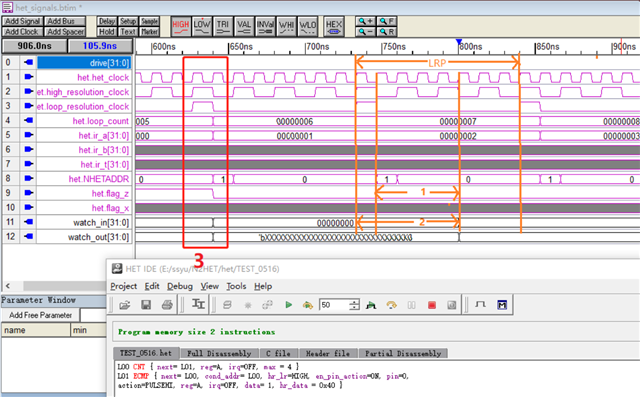
问题1:关于引脚行为的有效点。 在图1中的位置5、引脚操作在 LRP 的上升沿执行、这与图2中的问题描述一致。 但实际仿真结果显示它是在 LRP 的下降沿执行的、如图3中位置3所示。 实际操作应使用哪一个?
问题2:关于 HR 延迟期间引脚行为的有效点。 在图1中的位置4处、HR Delay 开始在 LRP 上升沿计算 HR 周期、并在 HR 上升沿执行引脚行为。 但在仿真中、可以发现、如果 HR 周期的计算是从 LRP 的上升沿按照图3中位置2所示的方式开始的、则 HR 延迟周期是错误的。 仿真结果似乎是 HR Delay 开始计算从 LRP 下降沿开始的 HR 周期、并在 HR 下降沿执行。 图3中位置1所示的引脚行为与图1中的描述不匹配。 实际操作应使用哪一个?
此致,
加里
