

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AM2434 浏览sciclient 的 API 文档(software-dl.ti.com/.../group__DRV__SCICLIENT__MODULE.html)后发现可以将驱动程序配置为 RTOS 感知和基于中断。 (https://software-dl.ti.com/mcu-plus-sdk/esd/AM243X/08_06_00_45/exports/docs/api_guide_am243x/group__SCICLIENT__HAL.html)
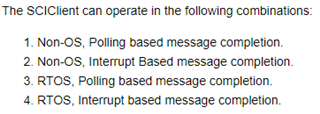
通过查看源代码、驱动程序仅支持基于轮询的裸机操作、与文档中所述相反。 在关键段内部进行轮询的驱动器会对基于 RTOS 的工程产生严重的副作用。
我们在 Jacinto7 PDK 中找到了一个带有服务器/客户端架构的驱动程序实现方案。 是否计划在 Sitara 架构上也移植此功能?
Jacinto7 PDK https://software-dl.ti.com/jacinto7/esd/processor-sdk-rtos-jacinto7/06_01_01_12/exports/docs/pdk/docs/user_guide/html/group__SCICLIENT__HAL.html
如果不是、是否能保证在指定时间内接收到来自 DMSC 的响应? 是否有由 sciclient 轮询引入的延迟信息?
感谢您的支持
奥利弗
