请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSPM0G3507 工具与软件:
您好!
我正在尝试找到一个 SPI 通信的示例。 仅找到 BSL_SPI_FLASH_interface、其中 SPI 配置为外设而不是控制器。
SPI 作为控制器是否有任何示例?
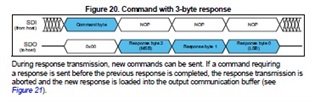
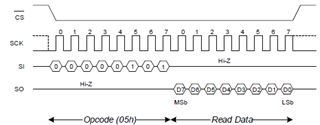
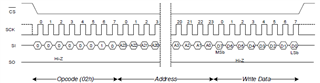
最终我的问题是这个。 当 MCU 是 SPI 控制器时、从器件的响应时钟将如何生成?
在用于从器件接收数据的 driverlib API 中、它不会发送虚拟数据来生成时钟。
__STATIC_INLINE uint8_t DL_SPI_receiveData8(SPI_Regs *spi)
{
return ((uint8_t)(spi->RXDATA));
}
上面的 API 只读取寄存器。
谢谢!
起重机