请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C1237H6PZ 工具与软件:
您好!
我正在处理一个硬故障、目前使我无法验证应用程序。
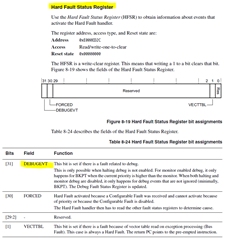
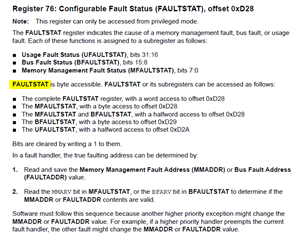
每次复位时、FAULT_STAT 寄存器均为零。
相反、硬故障 STAT 寄存器始终为零、但当触发 ISR 硬故障时、DBG 位为1 (仅此而已)。
在数据表中、该位保留用于调试、但应用程序未处于调试状态。
我找不到有关此类硬故障的其他信息。
因此、我想问、你能否详细说明这一点的意义和可能的原因
设置为1。
期待您的友好回答、
此致。