

Other Parts Discussed in Thread: DRV8329, LP-MSPM0G3507
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LP-MSPM0G3507 主题中讨论的其他器件:DRV8329、
工具与软件:
大家好!
FOC 调优指南( 链接 ,第5页)中提到 IPD 启动方法使用所有三相电流来检测初始位置,并在开环模式下加速电机,直到获得足够的 BEMF。 我正在使用的设置具有 LP-MSPM0G3507和 DRV8329 EVM、并使用 SDK mspm0_SDK_2_02_00_05中提供的示例 FOC 代码。 (马达 连杆 )
在上面的调整指南中,他们建议使用对齐和转到作为启动过程,它应该适用于大多数电机,但当我尝试这样做时,它只是停止。
1、当我尝试用 IPD 作为启动方法时,电机成功进入闭环状态,我能用 GUI 成功地控制速度。 DRV8329 EVM 仅具有单分流器设置、仍然是如何使用 IPD 运行的、而不是对齐或减慢第一个周期。
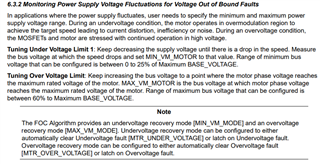
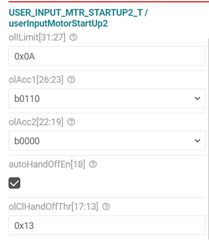
2.我已经尝试过按照指南中的说明对这两个参数进行调整、但是仍然无法对齐并且减慢第一个周期甚至能够成功进入开环模式。
提前感谢、
OM Dave







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}