Other Parts Discussed in Thread: LMC555, NE555, LM555, NA555, TLC551, SE555, TLC552, TLC555, SA555, CD4060B, CD4024B, CD4020B
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
主题中讨论的其他器件:LMC555、 NE555、 LM555、 NA555、 TLC551、 SE555、 TLC552、 TLC555、 SA555、 CD4060B、 CD4024B、 CD404040B、 CD4020B器件型号之间有何差异?
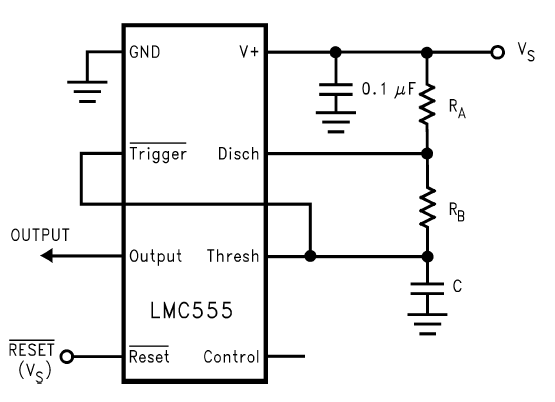
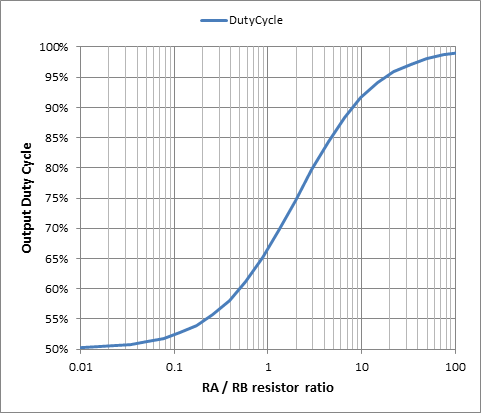
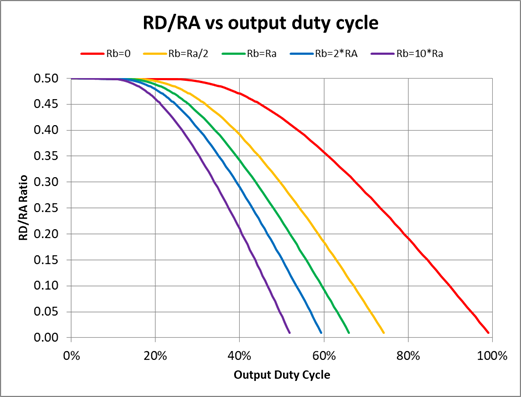
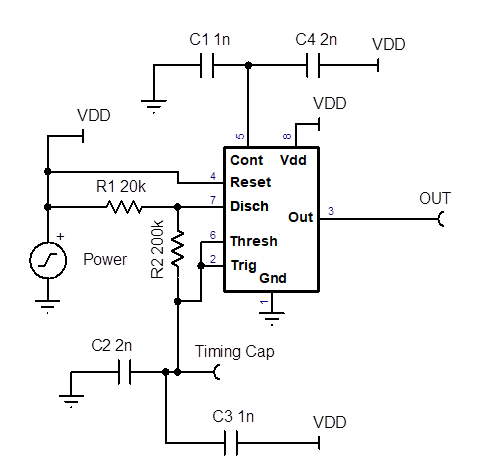
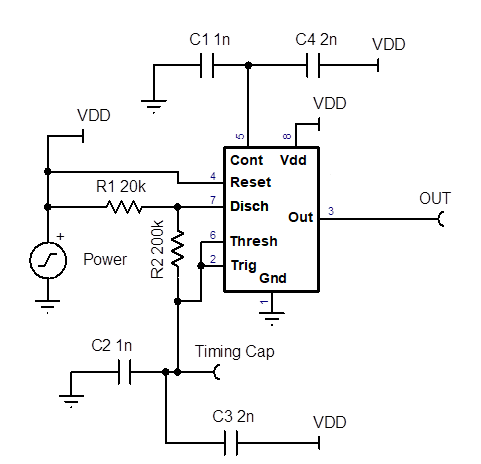
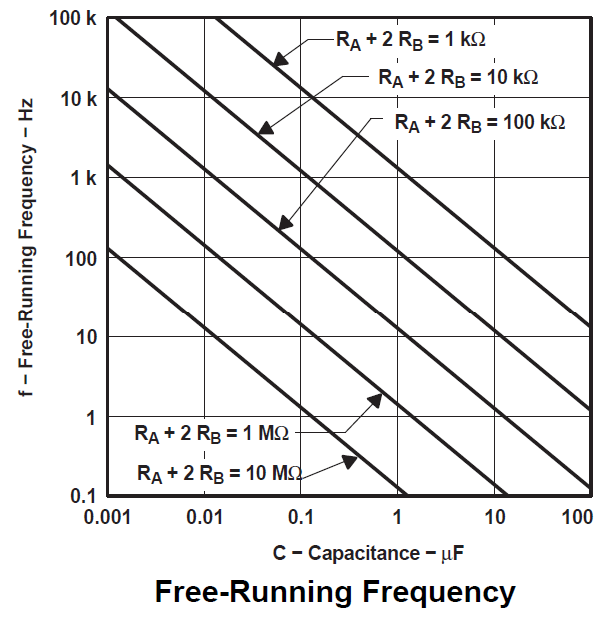
如何设置输出频率和占空比?
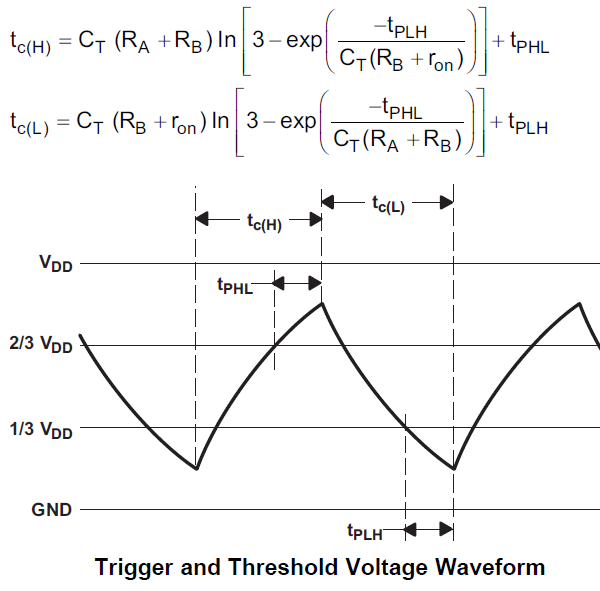
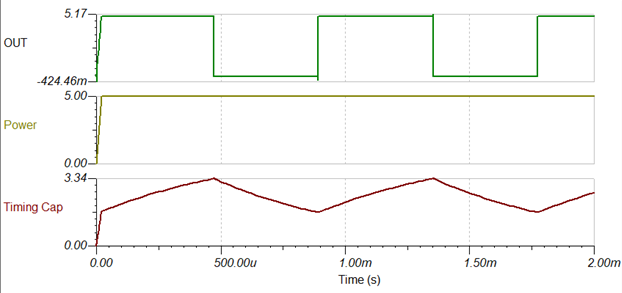
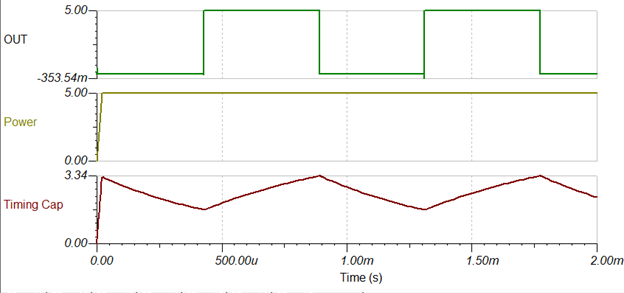
为什么实际频率与公式 1.44 /[(RA + 2 * RB)* C]不同?
为什么加电后的第一个输出脉冲与后续脉冲不同?
最大频率是多少?
最小频率是多少?
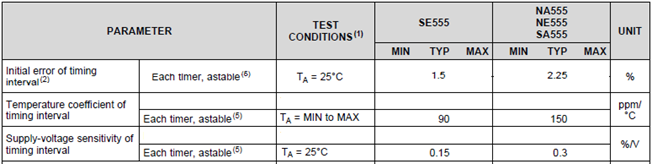
计时器的精度如何?