请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TM4C1294NCPDT 工具/软件:Code Composer Studio
您好!
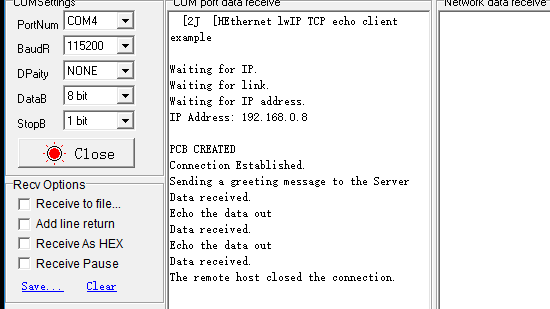
我正在尝试使用 enet_lwip 示例将数据连续发送到 http 服务器。 我有 http 客户端、但在发送第一个传输后、客户端本身会关闭连接。 我正在创建 http POST 请求,然后在 main 的 while 循环中调用 tcp_send_packet()。 它接收回调并在第一次传输后关闭连接。
ERR_t tcpRecvCallback (void *arg、struct tcp_pcb、struct pbuf *p、err_t err)
{
UARTprintf ("接收到的数据。\n");
if (p = NULL){
UARTprintf ("远程主机关闭了连接。\n");
UARTprintf ("正在关闭连接。\n");
tcp_close (testpcb);
返回 ERR_ABRT;
}
其他
{
UARTprintf (" pbufs %d\n"、pbuf_clen (p)的数量);
UARTprintf (" pbuf %s\n"的内容、(char *) p->payload);
}
返回0;
}

我用不同的方式尝试了它。 如果我将 tcp_setup 函数与 POST 请求和 tcp_send_packet()一起放入一段时间,则它将通过提供错误代码:-13来工作。 是否有人能建议我使用正确的方法从 http 客户端将数据连续发送到 http 服务器。
谢谢
此致
B S Sai Prasad