

Other Parts Discussed in Thread: ADS1219
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:ADS1219您好 TI、
我的 ADS1219IRTER 似乎无法正常工作。 我将 ADC 连接到 STM32F446RE、并尝试读取 AIN0 和 AIN1 之间的电压。 发送 ADC 开始同步命令 (0x80) 后、我始终得到一个 ADC 值不正确、即使输入 (AIN0 - AIN1) 发生变化也不会改变。 ADC 输入连接到一个简单的分压器、该分压器可衰减定制推挽式转换器的输出电压。 此推挽式转换器的输出电压会有所不同、但可以设置为 0.6V 至 1kV 之间的任何值、具体取决于 STM32 的占空比。 此设置的原理图如下所示 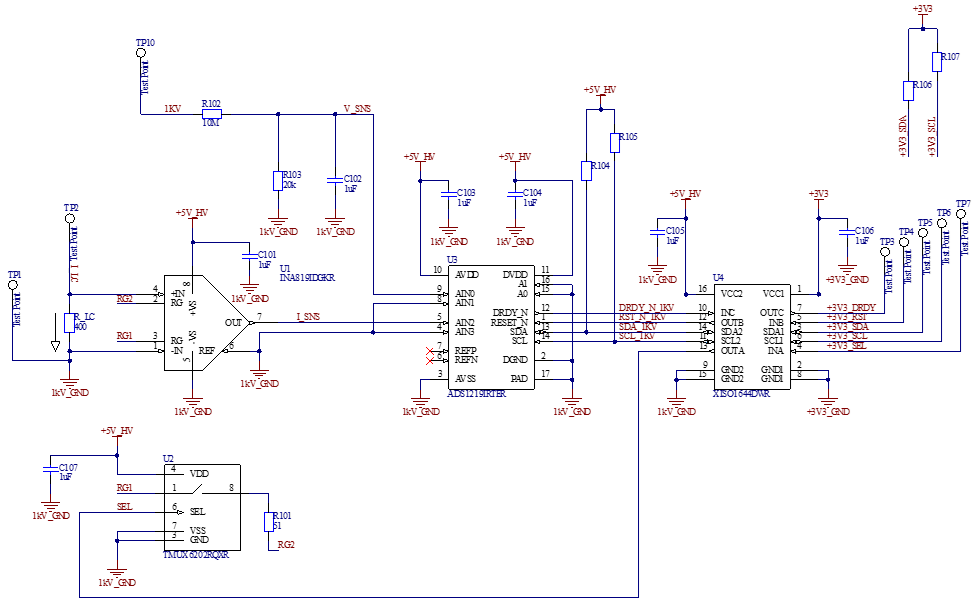
C201 由 5V 实验室电源供电。
TP3 -> PB5(GPIO 引脚)。
TP6 -> PB8 (I2C1 SCL)
TP4 -> PB6(持续设置为高电平)
TP7 -> PB7(持续低电平)
TP5 -> PB9 (I2C1 SDA)
C106 从 STM32 开发板获得电力。
主函数是 STM32 很简单。
- 配置 HAL
- 配置 UART (MODBUS)
- 通过两个计时器配置 PWM
- 为 ADC 配置 I2C。
int main(void)
{
//Vars
eMBErrorCode eStatus;
//0. Initialize HAL
HAL_Init();
//1. System Clock Config
SystemClock_Config();
//2. GPIO Config
//a. UART
MX_GPIO_Init();
HAL_Delay(10);
//b. PWM
MX_PWM_GPIO_Init();
HAL_Delay(10);
MX_TIM5_Master_Init();
MX_TIM2_Slave_Init(420);
//c. I2C for ADC
MX_I2C_GPIO_Init();
MX_I2C1_Init();
ADC_RST_HIGH();
//d. Configure ADC
//set_adc_gain(1);
//set_adc_mux(3);
//set_adc_sps(20);
//set_adc_cm(true);
//set_adc_vref(false);
//tx_adc_wreg();
tx_adc_start_sync();
//uint8_t config = rx_adc_rreg(0x0);
//3. PWM Timer Init
pwm_start();
HAL_Delay(100);
//4. I2C Test
//rx_adc_count();
//5. MODBUS
//a. Initialize
eStatus = eMBInit(MB_RTU, 0x0A, 0, 38400, MB_PAR_NONE, 1);
usRegInputBuf[0] = 1; /* Initialize counter */
usRegInputBuf[1] = 0;
usRegInputBuf[2] = 0;
usRegInputBuf[3] = 0;
//b. Enable the protocol stack.
eStatus = eMBEnable();
//c. Handle Errors
if( eStatus != MB_ENOERR )
{
Error_Handler();
}
/* Loop forever */
for(;;)
{
(void)eMBPoll();
}
}我触发 STM32 在 MODBUS 回调函数中读取 ADC 值、
eMBErrorCode
eMBRegInputCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs )
{
eMBErrorCode eStatus = MB_ENOERR;
int iRegIndex;
//0. Sensor Type -> (0x01)
//a. Check the register limits.
if( ( usAddress == 0x01 ) && (usNRegs == 0x02 ) )
{
//ModBus Standard Packet Size is Two Bytes or a Unsigned Short
//Smallest packet sends two bytes.
//i. Move to the next packet frame. -> Assign 0x00;
*pucRegBuffer++ = (UCHAR)(0x00);
//ii. Move to the next packet frame. -> Assign 0x49 or "I".
*pucRegBuffer++ = (UCHAR)(0x49);
}
//1. Current Input Register -> (0x02 to 0x04)
//a. Check the register limits.
else if( ( usAddress >= 0x02 ) && ( usNRegs == 0x02 ) )
{
//b. Get the current.
g_f_current = get_voltage();
//c. Convert float to ushort.
modbus_set_float_us(g_f_current, &test_float_us);
//iRegIndex = ( int )( usAddress - usRegInputStart );
iRegIndex = usNRegs-1;
//d. Copy current to ModBus Input Regs.
while( usNRegs > 0)
{
*pucRegBuffer++ = (UCHAR)(test_float_us[iRegIndex] >> 8);
*pucRegBuffer++ = (UCHAR)(test_float_us[iRegIndex] & 0xFF);
iRegIndex--;
usNRegs--;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}函数 get_voltage() 调用 rx_adc_count()、
float get_voltage()
{
int32_t adc_count = rx_adc_count();
float voltage = 0;
if (g_enum_gain == one)
voltage = (float)(adc_count*(2.0f*2.048f/1.0f)/16777216.0f);
else
voltage = (float)(adc_count*(2.0f*2.048f/4.0f)/16777216.0f);
return voltage;
}nt32_t rx_adc_count()
{
uint8_t adc_p[3];
uint8_t i2c_data = ADC_RDATA;
HAL_I2C_Master_Transmit(&hi2c1, SLAVE_ADDRESS, &i2c_data, 1, 10);
HAL_I2C_Master_Receive(&hi2c1, SLAVE_ADDRESS, &adc_p[0], 3, 10);
g_rx_adc_count = adc_p[0] << 16 | adc_p[1] << 8 | adc_p[2];
uint8_t pol_bit = g_rx_adc_count >> 23;
if (pol_bit == 0)
{
g_rx_adc_count_signed = g_rx_adc_count;
}
else
{
g_rx_adc_count_signed = g_rx_adc_count;
g_rx_adc_count_signed = g_rx_adc_count_signed - 16777216;
}
return g_rx_adc_count_signed;
}我已通过查看示波器上的 I2C 总线来验证 STM32 接收到的数据是否正确。

问题在于、当输入电压发生变化时、ADC 计数不会改变。
有人对我的行为有什么建议吗?
谢谢、
Allan
