请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:ADS131E08EVM-PDK 主题中讨论的其他器件: ADS131E08
您好、支持团队、
目前、我正在使用 STM32H745发现板处理 ADS131E08EVM-PDK 开发套件。
情景1.
-使用正常 SPI 发送-接收功能通过 ADS131E08寄存器进行读/写操作。
情形2.
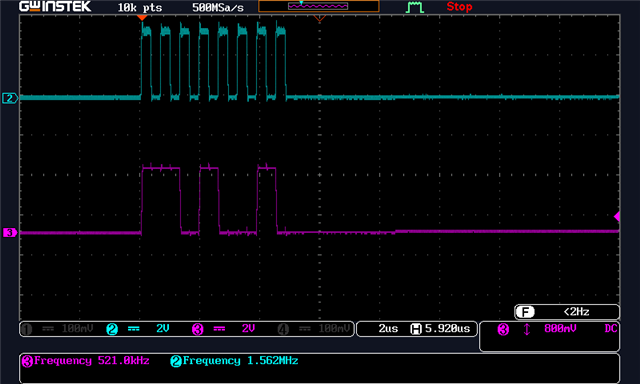
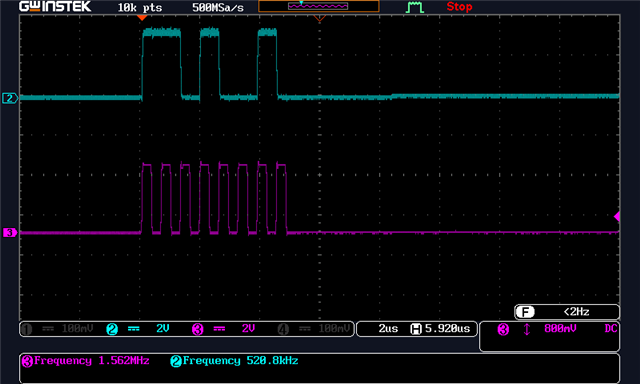
-当我使用 STM32H745发现板为 SPI 配置了 DMA 并为 ADS131E08的读/写寄存器使用 Transmit -Receive_DMA 功能时。
然后得到一些垃圾值。
STM32H745发现板需要任何特定配置?
此 ADS131E08 EVK 的 SPI+DMA 通信可使用任何示例。 对我来说很好。
环境详细信息:
硬件:ADS13xE08EVM Rev A, STM32H745 Discovery 板。
IDE 安装程序:STM32 Cube 版本:1.8.0