请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:ADS1282-SP 主题中讨论的其他器件: ADS1282
尊敬的所有人:
我 将使用 ADS1282-SP 来采集多个传感器、例如 RTD、电位器、介电常数和力传感器。
为了计算遥测预算、我需要清楚地了解 数字滤波器上数据的稳定时间以及如何从 ADC 获得稳定的数据。
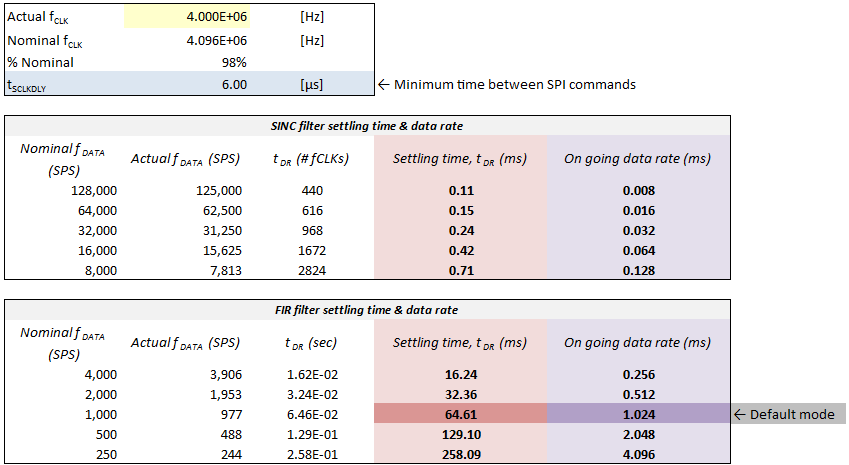
我的 ADC 的时钟频率为4、000 MHz。
我想使用最大 FIR 数据速率、如下公式所示:
- Fdata = Fclk /(4*DR*32) 、具有 DR 5r 正弦 滤波器抽取率
它返回 Fdata = 3906.25Hz 。
根据下表、FIR MOD 趋稳时间为 TDR = 62.98046875/Fdata + 466/Fclk = 0.0615/Fclk = 16.24ms
现在、核心问题是:
- 连续读取模式是否仅输出稳定的数据(即、第一个数据输出也从稳定的 fiter 返回)?
- 同步读取操作是否输出一 个稳定的数据(即 在数字滤波器稳定时间之后)?
- 命令 输出读取的数据是否立即(之后最大1/Fdata 秒)也可能不稳定?
- 一次性读取操作是否仅在 滤波器稳定后提供稳定的数据?
- 如何以及何时清空数字滤波器?
我将对 P 传感器使用连续读取、因为它是以非常快的速率(>2kHz)请求的、启用时不会请求其他传感器遥测。
相反、我将 使用单次触发或命令读取操作模式 来采集其他遥测数据、但我需要知道我是否需要手动等待 数据稳定、或者我是否可以依靠 ADC 重新传输仅稳定的数据。
您能不能帮助我了解这款单通道 ADC 的工作原理?
此致、
Daniele