

Other Parts Discussed in Thread: ADS8860
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:ADS8860 尊敬的团队:
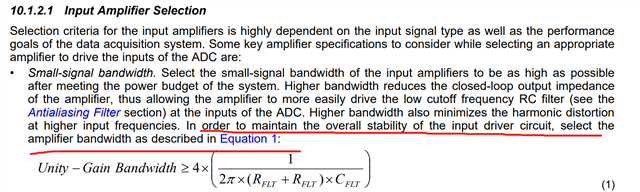
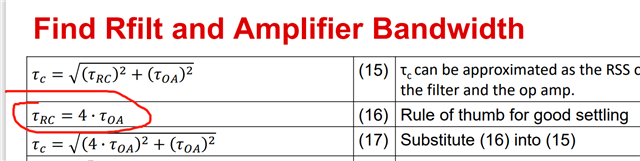
在 ADS8860的数据表中、它提到 ADC 驱动器的 UGBW 应该比1/2pirfltClt 大4倍、培训视频" R-C 组件选择背后的数学原理 TIPL 4406 TI 高精度实验室–ADC "中也提到了这一点。 为什么 ADC 驱动器的 UGBW 应该比1/2pirfltClt 大4倍、即 运算放大器比滤波器快4倍? 这种"四倍"背后是否有任何数学理论?
此致
Wesley


