请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:AFE4490 尊敬的:
在 AFE4490SPO2EVM 固件源 v1.4中有一个带通滤波器函数,遵循 processData();
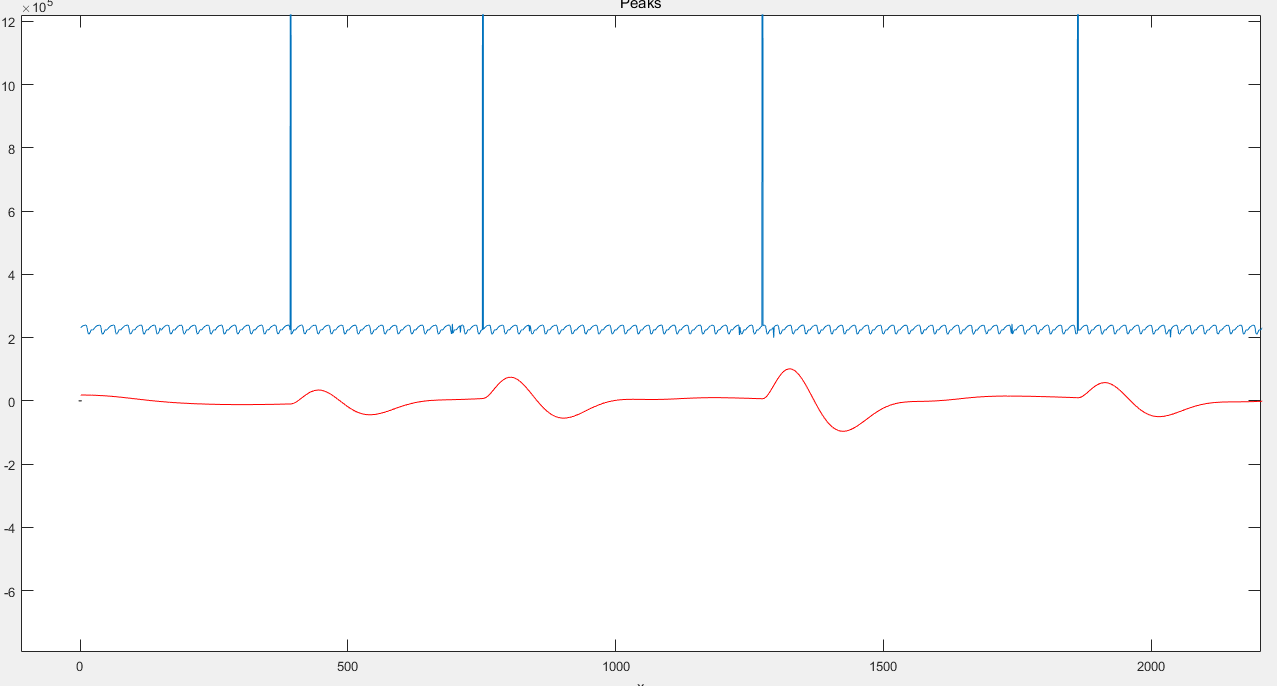
首先、我们得到 redcSample =collectRed()的 redcSample、并通过 MATLAB 将波形绘制为 Bule
然后、我们得到 filtIRSample = filter (redSample)、而 polt 波形由 MATLAB 显示为红色、 该 信号用于确定 信号是否通过零点并计算心率;
在图中、我们知道蓝色波形是正确的 SpO2 波形; 红色波形不 是正确的 SpO2;
我 想 知道为什么按 filter()处理不同的波形; 我知道该滤波器仅用于将波形移动到零点。
/** *@brief 处理收集到的红色和红外值 * *@param None * *@return None */ void processData() { static unsigned long i=0,j=0; voltageCodeCounter++; //跳过2秒后开始计算数据 if (voltageCodeCounter > 1000) { int index = voltageCodeCounter - 1001; //从 AFE4400读取红色和红外值 long irSample = collectIR(); long redSample = collectRedd (); //过滤 IR 值 //filtIRSample = filter (irSample); filtIRSample = filter (redSample); //GetIrData[i++]= filtIRSample; //if (i=1000) i=0; //GetFilterIrData[i++]= filtIRSample; // printf ("\n\r\n\r\n%8ld %8ld %d\n\r\n、redSample、filtIRSample、j++); //查找当前脉冲中的最大值和最小值 IR 和红色值 IF (脉冲启动) { if (irSample > maxIRValue) maxIRValue = irSample; if (irSample < minIRValue) minIRValue = irSample; if (redSample > maxRedValue) maxRedValue = redSample; if (redSample < minRedValue) minRedValue = redSample; } PreviousValue = CurrentValue; //CurrentValue = filtIRSample; CurrentValue = filtIRSample; //如果已过滤数据中有从负到正的转换 if (PreviousValue < 0 && CurrentValue > 0) { if (translions[0]=-1) transles[0]= index;//如果这是第一个转换 否则、如果(translions[1]=-1)//如果这是第二次转换 { 转换[1]=索引; pulseStarted=1;//仅在2个确认的转换后设置脉冲启动标志 } 其他 { //保留最后两次转换的索引以估算脉冲长度 转换[0]=转换[1]; 转换[1]=索引; //Call 信号函数、用于计算心率和 SpO2 心率= calcHeartRate (转换[0]、转换[1]); PulseOx = calcPulseOx (maxIRValue、minIRValue、maxRedValue、minRedValue); //Average Heart Rate with previous history of values if (hist_count < 4) { decision_hist[hist_count]=心率; HIST_COUNT++; hist_sum = hist_sum +耳戴式; 心跳2 =心率; } 其他 { // if (耳戴>(HET_SUM/4+300) ) if (耳戴>(HET_SUM/4+3)) { //cedrate2 = decision_hist[3]+(delta_hr)*100; 心跳2 = Decision_Hist[3]+(delta_hr)*1; if (delta_hr <3) Δ_hr++; } //else if (耳戴<(HET_SUM/4-300) ) else if (耳戴<(HET_SUM/4-3)) { //cedrate2 = decision_hist[3]-(300 -(delta_hr)*100); cedrate2 = decision_hist[3]-(3-(delta_hr)*1); 如果(delta_hr >0) Δ_hr--; } 其他 { 心跳2 =心率; } hist_sum = hist_sum - decision_hist[0]+ c心跳2; decision_hist[0]= decision_hist[1]; decision_hist[1]= decision_hist[2]; decision_hist[2]= decision_hist[3]; decision_hist[3]=心跳速率2; 心跳报告= HIST_SUM/4; } //重置最大和最小默认值,以便在下一个周期进行比较 maxIRValue = 0; minIRValue = 1000000000; maxRedValue = 0; minRedValue = 1000000000; } }
/** *@0.5至3Hz 之间的短带通滤波 器* *@param 采样 a long * @return long */ long filter (long sample) { // const long b_int [3][3]={ //(long)(SOS [0][0]* scale)、(long)(SOS [0][1]* 2)、 long (sos)(long/s)[0](long])、(sos)[0)、(long](sos [0]*)、[0) (SOS [1][0]*换算)、(长整型)(SOS [1][1]*换算)、(长整型)(SOS [1][2]*换算)}、 //(长整型)(SOS [2][0]*换算)、(长整型)(SOS [1][2]* 换算)、(长整型)(SOS [2]/[3]/长 整型)(SOS [3]/[3]/[0]/(长整型)(SOS [0]/[0]/)[*[*)[SOS[*[*[0]/(SOS [0]/长整型) (SOS [0][5]* Scale)}、 //{(long)(SOS [1][3]* Scale)、(long)(SOS [1][4]* scale)、(long)(SOS [1][5]* scale)}、 //{sos [1][5]* scale)、(sos [2][3]* scale)、(long)、(0、 0[0、 0]0 、0]0、0[0、0]0、0]0、0[0、0]0、0]0、0]0、0[0、0]0、0]0、0]0、0[0、0]0、0]0、0[0、0]0、0]0、0[0、0]0、0]0、0]0、0[0、0]0、0]0、0[0、0]0、0]0、 for (k=0;k<3; k++) { for (j=0;j<3;j++) { b_int[k][j]=(long)(sos [k][j]* scale); a_int[k][j]=(long)(sos [k][j+3]* scale); } // long s_[4]* ( s)、long scale (0)(s)(s [0)、s (s [0)、s (s)、s (s [0)、s (s [0)、s (s)、s (s [0)、s (s [0、s)、s (s)、s (s (s)、s)、s (s (s)、s (s)、s (s [0、s)、s (s (s) for (j=0;j<4;j++) { s_int[j]=(long)(s[j]* scale); } static long dly[阶段][2]={0、0}、{0、0}、{0、0}}; 长结果、wn; long mysample =采样; 长 WA1、WA2、WA3; 长 wb1、wb2、wb3; int i; 对于(I = 0;I <级;I++) { //二阶 LCCDE 代码 //(eqn 8) WA1 =((long long) mysample * s_int[i])>>(TRUNC_BITS); wa2 =((long long) a_int[i][1]* dly[i][0])>> TRUNC_BITS; WA3 =((long long) a_int[i][2]* dly[i][1])>> TRUNC_BITS; WN = WA1 - WA2 - WA3; //(eqn 9) WB1 =((long long) b_int[i][0]* wn)>> TRUNC_BITS; WB2 =((long long) b_int[i][1]* dly[i][0])>> TRUNC_BITS; WB3 =((long long) b_int[i][2]* dly[i][1])>> TRUNC_BITS; 结果= wb1 + wb2 + wb3; //更新第一阶段的过滤器缓冲区 dly[i][1]= dly[i][0]; DLY[I][0]= wn; mysample =结果;//以防我们必须再次循环 } 返回(长)结果 ;}