Other Parts Discussed in Thread: TCAN3414, LM2841
主题: LM2841 中讨论的其他器件
工具/软件:
尊敬的 TI 电路向导:
帮助! 我遇到了一个困扰了几周之久的问题、现在似乎能够将其来源范围缩小到主机微控制器/CAN 控制器和 TCAN3414 收发器之间的通信。 该电路基本上是一种混合信号测量系统、通过将微小信号吹入方波来测量时序、并且在模拟侧具有很大的增益 (>50dB)。 此外(遗憾的是)在该版本的电路中、模拟信号链中第一个功能块基本上没有电源抑制功能(假设采用共发射极单 BJT 结构)。 如果电源中有任何纹波频率恰好在目标频率范围内、我们就会开始出现问题、尤其是因为模拟电路具有 AM 包络检测。
但理论上、所有电流消耗瞬态可能导致纹波的数字器件都以更高的频率运行、我们也认为了这一点。
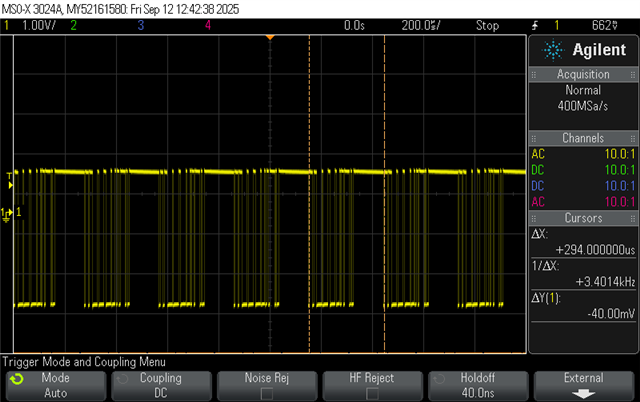
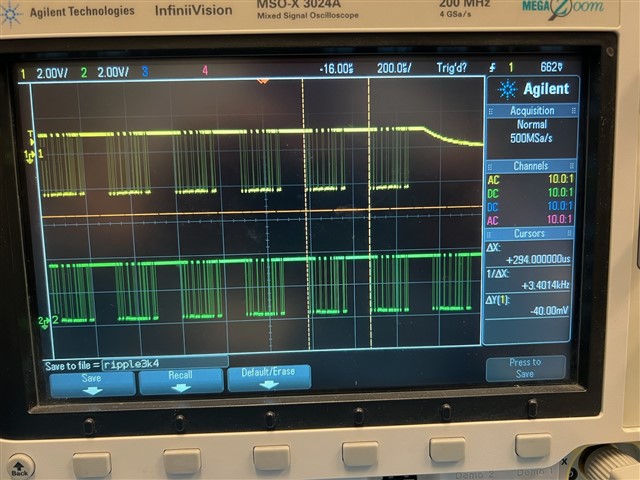
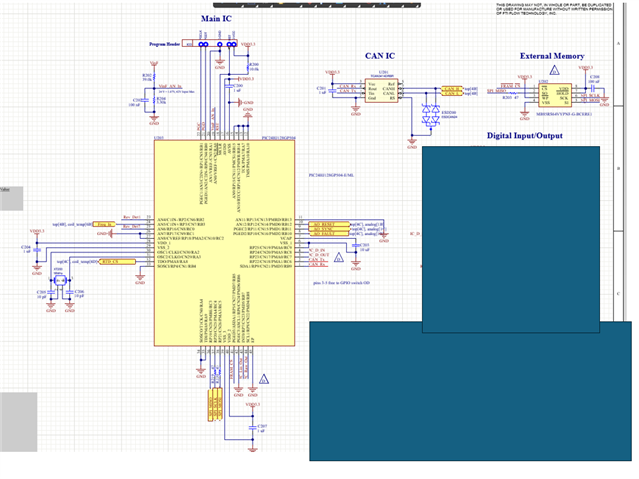
这是我们器件系列中的产品首次使用 TCAN3414。 以前的版本使用了 5V CAN 收发器 (SN55HVD251DRJR)、这没有问题、但这些设计的增益刚好明显较低、通常具有更好的 PSRR(以及不同的电流消耗规格)。 在问题子设计中、似乎每当主机微控制器准备好基本代码(我没有编写该代码,但可以在必要时访问信息)以与 TCAN 通信时、电源中就会出现这个极其一致的 3.4kHz 纹波、该纹波正好位于我们所需的模拟频率范围的中间。 我添加了以下原理图的代码片段以帮助进行演示。 TCAN 由下图所示的 3.3V 电源轨供电、通过使用 LM2841 将输入电压 (9V 至 30V) 关断至大约 6V、然后通过两个线性稳压器(3.3V 稳压器与 5V 稳压器串联)运行。 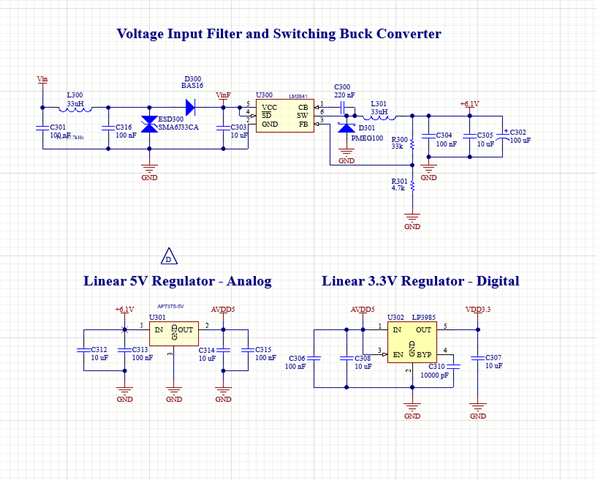
此设计采用符合 RoHS 标准的小型 4 层 FR-4 PCB、并具有以下(铜)层叠:
1) 底部铜(这是所有敏感模拟电路的位置)
2) 接地平面(不间断)
3) 参考平面(分段)
4) 顶层覆铜(几乎所有数字 IC 都驻留在这里 — 值得注意的是,CAN 芯片几乎尽可能远离模拟电路)
我考虑并调查了以下故障模式:
-最大电流消耗超过: SMPS. 根据数据表、LM2841 限制值为 300mA、系统电流消耗约为 100mA、因此这不是我们的问题。
-饱和电流达到: SMPS 电感器。 API Delevan S1210R-333K 具有 189mA 的最大额定电流(注意-未指定饱和电流)。 同样、在正常运行期间、系统电流消耗正好位于 100mA 周围。 我甚至尝试了一种具有更高最大额定电流 (243mA) 的类似电感器 (SP1210R-333K),以防万一 — 没有显著差异。 可能有微小的振幅差异。 这似乎与问题无关。
-最大电流消耗超过: 3.3V LDO (LP3985IM5-3.3/NOPB)。 这似乎是一个可能的因素。 限制为 150mA、最坏情况下的总电流(假设无总线故障)总计至 141mA((MCU 在 48MHz 下运行、实际上为 24MIPS、因此数据表中提供的电流消耗在+85°C 下最大,这是该器件将使用的最高温度)。 由于总线故障、这会为电流消耗增加另一个 70mA、因此我可能会认为这可能是个问题、但我没有 CAN 专家。 我们的固件团队说、在典型使用情况下没有任何总线故障行为、我可以看到在连接和终止 CAN 线路的情况下出现 3.4kHz。 电流峰值可能会跳过该 150mA 限值。
-最大电流消耗超过: 5V LDO (AP7375 )。 这似乎不大可能。 该 LDO 的最大电流消耗为 300mA、模拟测量方面仅消耗少量 mA、小于 50。
- SMPS 控制环路稳定性 — 降低积分器增益,增加前馈电容,没有改变关于 3.4kHz 纹波
-考虑到纹波的频率有多低,我从 6V 电压轨上移除了 100uF 电容器,看看它是否会影响振荡频率 — 它没有。 我还在 3.3V 电源轨上添加了 100uF、便于查看。 没有变化。
-与 TCAN 芯片通信。 当我们的引导加载程序从 MCU 擦除后、纹波立即消失、引导加载程序中唯一的功能是简化 CAN 通信的代码。 我还使用了一把 Xacto 刀切断 TCAN 芯片的电力输送迹线,纹波立即消失。 我还有一次切断了 5V 和 3.3V LDO 之间的连接、并且纹波也消失了、因此 3.3V 电源轨上的某些器件肯定会导致此问题。
感谢这里的任何帮助。 在我看来、这个 3.4kHz 问题要么是 MCU 和 TCAN3414 收发器之间的通信导致的、要么是该通信的电流消耗增加的结果、但我可能会在脸上遗漏一些东西。 循环的 3.4kHz 周期以及它多么残酷的一致必须是某种暗示,对吧? 如果我能提供更多信息(波特率或其他任何信息)、请告诉我、并提前感谢您的帮助!
此致、
Nathan
PS 并联、我将看到是否可以获取具有更高电流输出的引脚对引脚 3.3V LDO、看看这是否有所不同。 反馈。