请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TCAN4550EVM 主题中讨论的其他器件:MSP430FR6989、 TCAN4550
大家好、
我希望测试 TCAN4550能够正常工作、因此我将使用 MSP430FR6989与其进行连接以进行测试。
我有2个 FR6989 + 2个 TCAN4550 EVM。
连接如下所示:
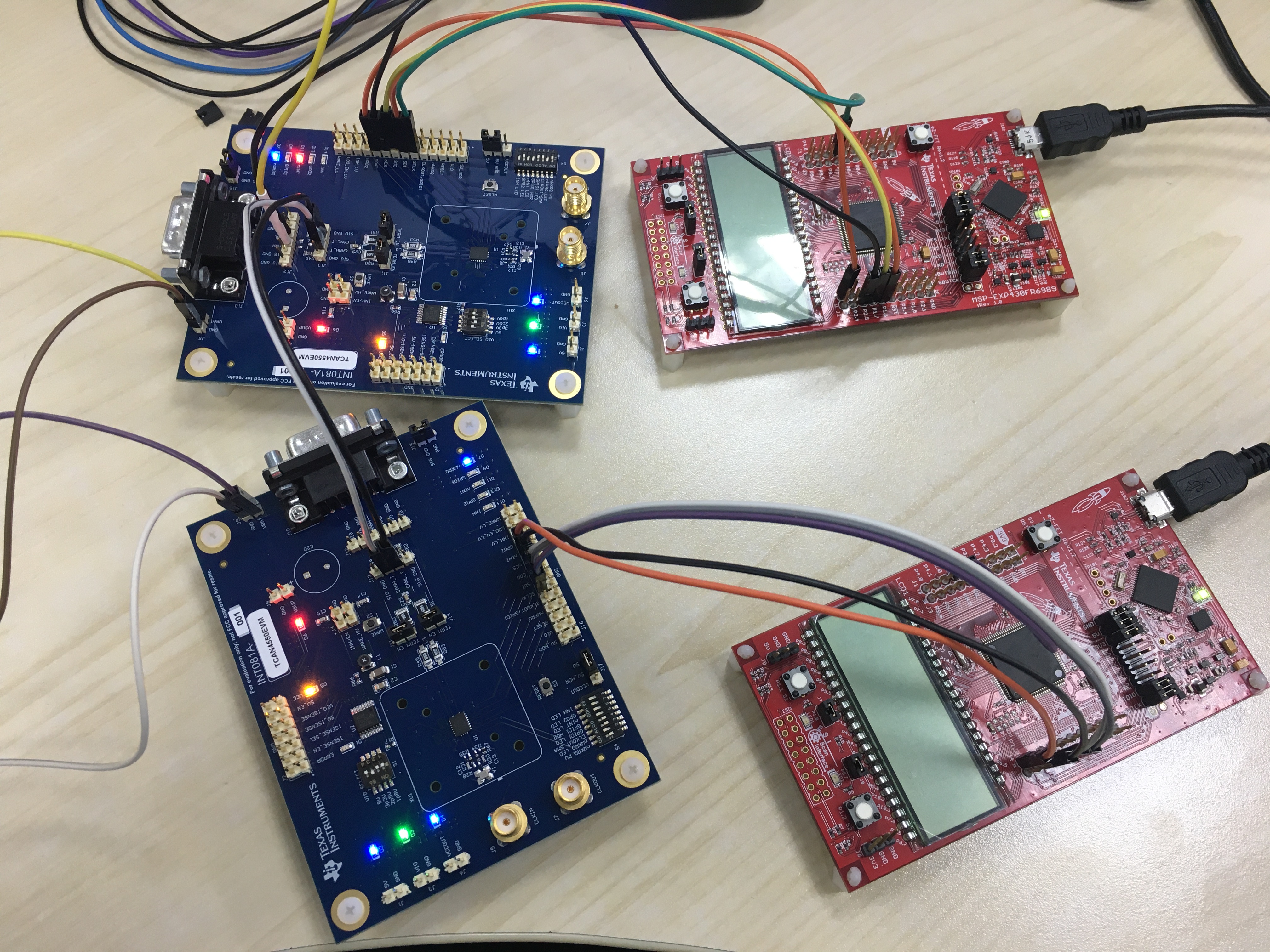
电源:直流- 12V
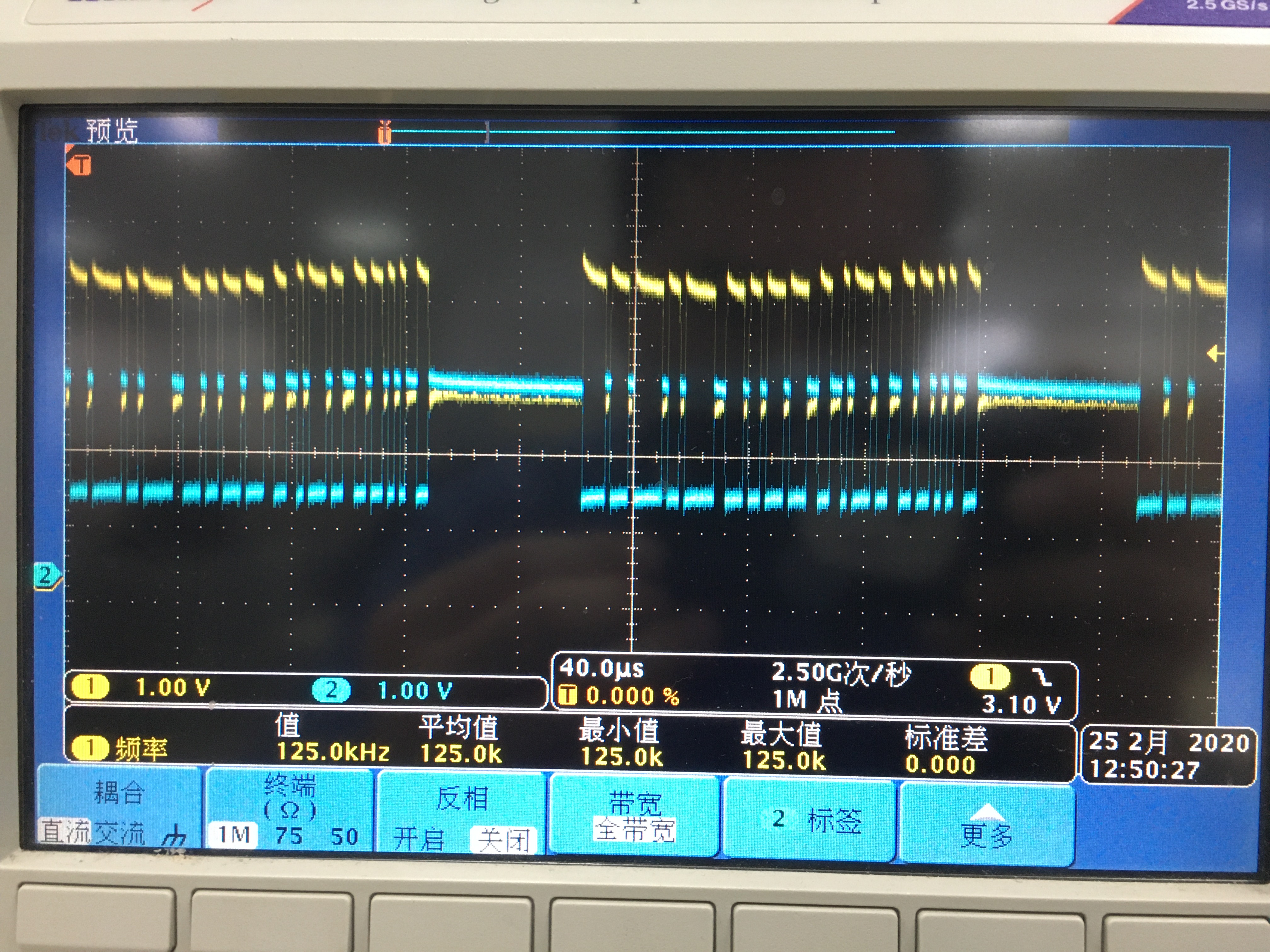
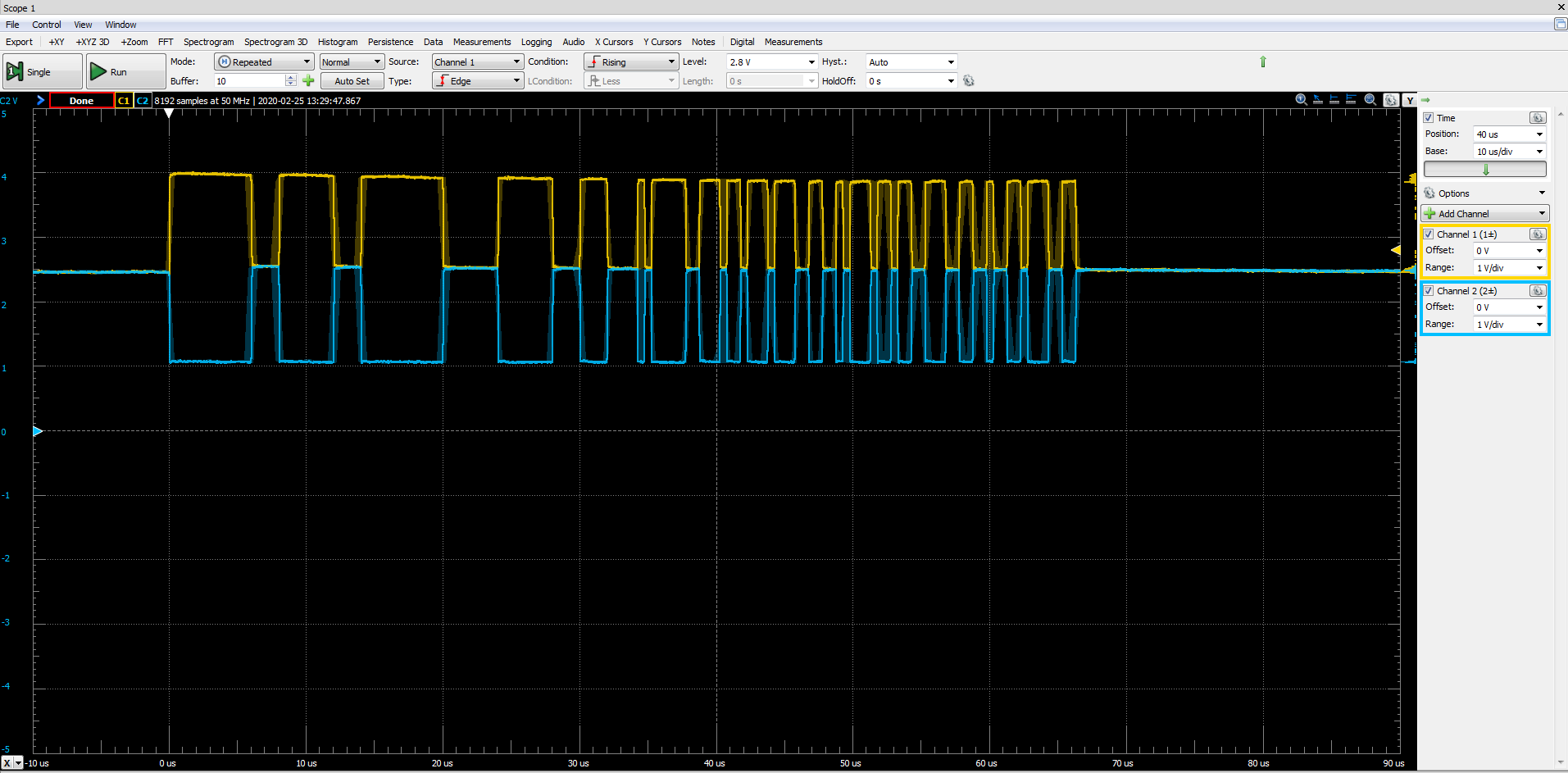
当在一个 MCU 上按下 S1按钮(发送 CAN 数据)时、另一个 MCU 没有收到相应的中断、我使用逻辑分析仪来监控 CAN 总线波形、并且没有波形。
在硬件上连接错误的位置是什么? 或者我是否需要进行其他设置?
请帮帮我。
此致
Johnson