This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
https://e2e.ti.com/support/interface-group/interface/f/interface-forum/1285319/thvd1400-rs485-auto-txrx-distortion-at-115200-baud-rate
团队成员:
您可以帮助查看115200波特率下的自动 RX TX 问题的附加 SCH 吗?
但9600波特率在这里运行良好。 感谢您的评论。
e2e.ti.com/.../THVD1400_2D00_RS485-issue.docx
您好、Allen:
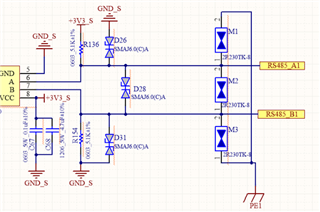
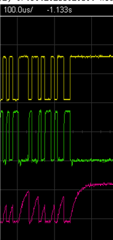
原理图显示 DE 和#RE 引脚短接在一起。 当 TX 线路驱动为低电平时、RS485收发器能够主动驱动电缆侧。 但当 TX 线路驱动回高电平时、BJT 电路会将 DE/#RE 设置为逻辑低电平、从而使 RS485收发器从有源驱动器变为高阻抗接收器。 这意味着器件不再能够以相反方向主动驱动 A-B 引脚。 而是电缆侧依靠 RC 电路通过泄漏进行放电。 在具有115200数据速率的第二个波形中、您可以看到 CH4上的 A-B 粉色波形具有 RC 时间常数放电。 由于您发送的位周期比 RC 时间常数快、A-B 网络无法及时地从 GND 摆动到 Vcc。
它可与9600波形配合使用、因为您可能具有足够慢/足够宽的位周期来让 RC 电路及时放电。
我们建议您更改电路、以使用以下 TI 参考设计中的计时器电路: https://www.ti.com/lit/ug/tidubw6/tidubw6.pdf?ts = 1698434598279&ref_url=https%253A%252F%252Fwww.google.com%252F
或者可能使用包含内部自动方向控制功能的 THVD1406。
-鲍比
您好、 Bobby:
谢谢大家的回复和分享,让我 先检查一下文件。
您好, Bobby:ć
几天后与 sch(英语:sch)和 logic(英语:sch)一起检查。
1.当没有数据时、TX=1、Q9开启、DE=0、进入接收模式。 2.发送数据1时,TX=D1=1。 由于它仍处于接收模式且驱动器处于高阻抗状态、因此 TX 断开 A/B、AB 电压由上拉和下拉电阻确定、然后 A = 1、B = 0变为逻辑1 3.发送数据0时、TX=0、Q9未打开、DE=RE=1、驱动器被启用、A=0、B=1、它成为逻辑0。
所以我认为 SCH 是正确的。
基于 电缆侧理论、依靠 RC 电路通过漏电、R=5.1K 和 C MAJD 对 SMAJ6.0器件放电。 所以您的意思是 A-B 侧需要通过5.1K 和 TVS 放电/充电器? 并且此 RC 时间> Tbit=1/115200=8.6us。 那么它不起作用?
我发现 THVD1406 tdevice_autodir 的 Type 值为8us、在115200波特率下非常接近 Tbit、它是否起作用?
但当处理9600时、低于 Tbit=1/9600=104us。 而 A-B 的 RC 时间比如30us > 104us、所以它是有效的。 我是对吗?
1. 当没有数据时、TX=1、Q9开启、DE=0、进入接收模式。
如果 TX 为=1、那么您设置的 BJT 将打开、这将驱动 DE=0 (禁用驱动器)和/RE 为0 (启用接收器)。
2. 发送数据1时、TX = D1 = 1。 由于它仍处于接收模式且驱动器处于高阻抗状态、TX 断开 A/B、AB 电压由上拉和下拉电阻确定、然后 A=1、B= 0变为逻辑1 [/报价] 是的、A 将为~3.3V、B 将为~Ω GND、因此 A-B = VOD 或逻辑1。 您依靠 RC 常量生成该电压、其中 R 为外部电阻值。 C 是 A/B 引脚上的电容负载。 3. 发送数据0时、TX=0、Q9未打开、DE=RE=1、驱动器被启用、A=0、B=1、它成为逻辑0。[/报价] TX=0因此 BJT 关闭、因此 DE=1 (驱动器被启用)和/RE=1 (接收器被禁用)。 这意味着当您驱动"0"时、RS485收发器将激活驱动 信号、但仅当您驱动"0"时。 RC 常量仍然存在、但不是从外部上拉电阻器到~5.1k、您可以从 THVD1400获得更强的"R"(THVD1400的 R 比5.1k 强得多)。 A-B 示波器上的下降沿可能快于支持下降沿。 所以我认为 SCH 是正确的。 [/报价] 如果您可以、则说明器件仅在 TX=0时主动驱动。 当 TX=1时、它不允许 THVD1400驱动反向信号。 这意味着在禁用期间无法以超过 RC 常数的速度运行。 您是不是说 A-B 侧需要通过5.1K 放电/充电器和电视? 并且此 RC 时间> Tbit=1/115200=8.6us。 那么它不起作用?[/quote][/quote][/quote] 您还需要考虑器件从活动输出切换到接收器模式所需的时间。 这将食入位周期。 THVD1400的典型时间为4us、最大时间为10us。 这会占用您尝试在 TX 上发送的"1"的位周期。 这让我觉得您的 Tbit 将是8.6us 加4us 典型值(如果我们假设1个 RC 足够的话)。 您的高位周期将持续更长的时间、从而破坏您的比特率。 因此、我实际上认为这种方法不适合高波特率。 对于低波特率、这可以正常工作、但在较高速度下、禁用时间过长、会导致接收信号不匹配。 因此我发现 THVD1406 tdevice_autodir 的 Type 值是8us,非常接近 Tbit,当波特率为115200时,它是否起作用? 是的、THVD1406比依靠 电流设置更好。 有源驱动能力将在 A-B 引脚上提供更好的信号。 我的理解是、该器件具有自动方向功能、可使 THVD1406保持 为有源驱动器、仅在 TX 线路从 低电平变为高电平至少4 μ s 时切换回接收器。 如果 在 TX 上的下一个高电平到低电平转换之前、连续发送过多的"1"、器件将切换回接收模式。 -鲍比 [/quote][/quote][/quote]
是的、A 将为~3.3V、B 将为~Ω GND、因此 A-B = VOD 或逻辑1。 您依靠 RC 常量生成该电压、其中 R 为外部电阻值。 C 是 A/B 引脚上的电容负载。
3. 发送数据0时、TX=0、Q9未打开、DE=RE=1、驱动器被启用、A=0、B=1、它成为逻辑0。[/报价] TX=0因此 BJT 关闭、因此 DE=1 (驱动器被启用)和/RE=1 (接收器被禁用)。 这意味着当您驱动"0"时、RS485收发器将激活驱动 信号、但仅当您驱动"0"时。 RC 常量仍然存在、但不是从外部上拉电阻器到~5.1k、您可以从 THVD1400获得更强的"R"(THVD1400的 R 比5.1k 强得多)。 A-B 示波器上的下降沿可能快于支持下降沿。 所以我认为 SCH 是正确的。 [/报价] 如果您可以、则说明器件仅在 TX=0时主动驱动。 当 TX=1时、它不允许 THVD1400驱动反向信号。 这意味着在禁用期间无法以超过 RC 常数的速度运行。 您是不是说 A-B 侧需要通过5.1K 放电/充电器和电视? 并且此 RC 时间> Tbit=1/115200=8.6us。 那么它不起作用?[/quote][/quote][/quote]
TX=0因此 BJT 关闭、因此 DE=1 (驱动器被启用)和/RE=1 (接收器被禁用)。 这意味着当您驱动"0"时、RS485收发器将激活驱动 信号、但仅当您驱动"0"时。 RC 常量仍然存在、但不是从外部上拉电阻器到~5.1k、您可以从 THVD1400获得更强的"R"(THVD1400的 R 比5.1k 强得多)。 A-B 示波器上的下降沿可能快于支持下降沿。
所以我认为 SCH 是正确的。 [/报价] 如果您可以、则说明器件仅在 TX=0时主动驱动。 当 TX=1时、它不允许 THVD1400驱动反向信号。 这意味着在禁用期间无法以超过 RC 常数的速度运行。 您是不是说 A-B 侧需要通过5.1K 放电/充电器和电视? 并且此 RC 时间> Tbit=1/115200=8.6us。 那么它不起作用?[/quote]
如果您可以、则说明器件仅在 TX=0时主动驱动。 当 TX=1时、它不允许 THVD1400驱动反向信号。 这意味着在禁用期间无法以超过 RC 常数的速度运行。
您是不是说 A-B 侧需要通过5.1K 放电/充电器和电视? 并且此 RC 时间> Tbit=1/115200=8.6us。 那么它不起作用?
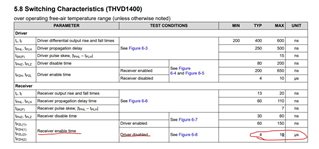
您还需要考虑器件从活动输出切换到接收器模式所需的时间。 这将食入位周期。 THVD1400的典型时间为4us、最大时间为10us。 这会占用您尝试在 TX 上发送的"1"的位周期。 这让我觉得您的 Tbit 将是8.6us 加4us 典型值(如果我们假设1个 RC 足够的话)。 您的高位周期将持续更长的时间、从而破坏您的比特率。 因此、我实际上认为这种方法不适合高波特率。 对于低波特率、这可以正常工作、但在较高速度下、禁用时间过长、会导致接收信号不匹配。
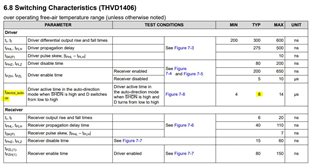
因此我发现 THVD1406 tdevice_autodir 的 Type 值是8us,非常接近 Tbit,当波特率为115200时,它是否起作用?
是的、THVD1406比依靠 电流设置更好。 有源驱动能力将在 A-B 引脚上提供更好的信号。
我的理解是、该器件具有自动方向功能、可使 THVD1406保持 为有源驱动器、仅在 TX 线路从 低电平变为高电平至少4 μ s 时切换回接收器。 如果 在 TX 上的下一个高电平到低电平转换之前、连续发送过多的"1"、器件将切换回接收模式。