请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TCAN1144-Q1 主题中讨论的其他器件:TCAN1145EVM
您好!
我已经对 TCAN1144进行了测试、并对其进行了原型设计、从而将其实施到一些现有硬件中。
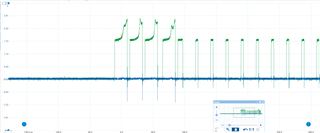
通过自定义 spidev 程序测试的总线故障检测功能、该程序每1秒轮询 INTCANBUS 寄存器并报告故障状态。
除了偶尔检测到的 CANLGND 之外、CANLGND 还能成功检测到所述的所有故障。 而且、它每时每刻都错误地检测到半端接。
芯片的配置方式与此类似、INH 和 WAKE 因其未使用而被拉至 GND。
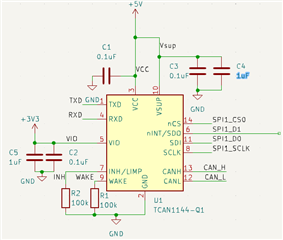
然而、电源、SPI 和 CAN 连接都与分线板断开、并焊接到预先存在的 PCB 的焊盘上、因此设置起来并不困难。
要测试收发器的 CAN 总线长度相当短、因此这应该不是问题。
之前、该芯片使用 TCAN1145EVM 进行了测试、其中 TX、RX 和 SPI 导线从预先存在的 PCB 馈送到 EVM、发现其工作原理相当可靠。 但在采用新设置时、情况并非如此。
有没有想法知道在检测到该错误时、什么样的差异/条件会导致芯片工作不正常?
此致、
最大值