请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-CC1310 主题中讨论的其他器件:CC1310
您好!
我想知道如何在回调模式下退出 SPI_TRANSMIT。
CC1310 Launchpad 作为 SPI 从设备运行。
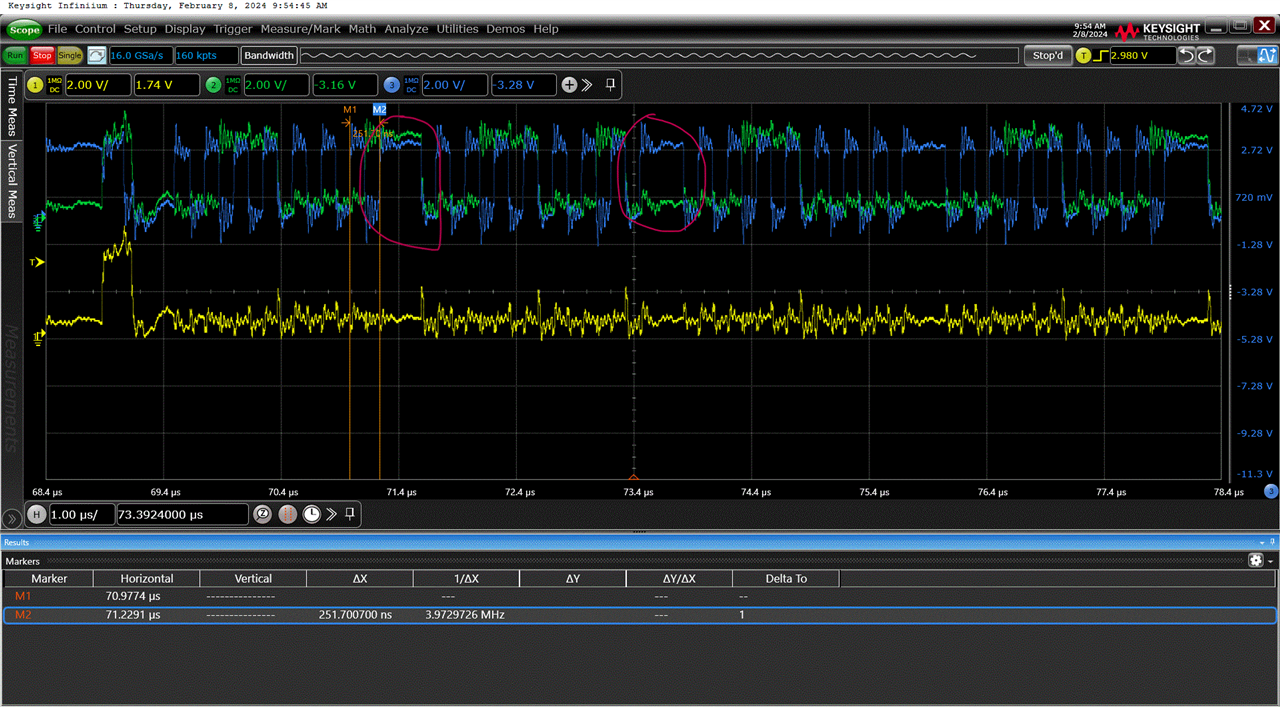
在获取 SPI 数据时、SPI 从器件不会不时调用回调。
此时、如何退出 SPI_TRANSMIT。 或者如何调用回调函数。
下面是我的 CC1310代码。
当 SPI 从器件正常运行时、 "transferOK"变量将设置为"0"。 然后其余代码运行。
#define SPI_MSG_LENGTH (200) + 3
#define DATA_ENTRY_HEADER_SIZE 8 // Constant header size of a Generic Data Entry
#define MAX_LENGTH SPI_MSG_LENGTH // Set the length of the data entry
#define NUM_DATA_ENTRIES 1
#define NUM_APPENDED_BYTES 0
/* TX queue or RF Core to read data from */
static dataQueue_t dataQueue;
static rfc_dataEntryGeneral_t* currentDataEntry;
static uint8_t *pPacket;
static uint8_t txDataEntryBuffer[RF_QUEUE_DATA_ENTRY_BUFFER_SIZE(NUM_DATA_ENTRIES,
MAX_LENGTH,
NUM_APPENDED_BYTES)];
/***** Variable declarations *****/
static bool transferOK;
static bool transferOK2;
uint8_t slaveRxBuffer[SPI_MSG_LENGTH];
/* Pin driver handle */
static PIN_Handle ledPinHandle;
static PIN_State ledPinState;
PIN_Config ledPinTable[] = {
Board_PIN_LED0 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX,
Board_PIN_LED1 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX,
PIN_TERMINATE
};
static PIN_Handle slaveRdyHandle;
static PIN_State slaveRdyState;
PIN_Config slaveRdyTable[] = {
Board_DIO21 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_DRVSTR_MAX,
PIN_TERMINATE
};
static PIN_Handle masterRdyHandle;
static PIN_State masterRdyState;
PIN_Config masterRdyTable[] = {
Board_DIO15 | PIN_INPUT_EN,
PIN_TERMINATE
};
static void SPIRxCallback(SPI_Handle handle, SPI_Transaction *transaction)
{
transferOK2 = 0;
if(transaction->status == SPI_TRANSFER_COMPLETED){ // Green
PIN_setOutputValue(ledPinHandle, Board_PIN_LED1, !PIN_getOutputValue(Board_PIN_LED1));
}
else{
PIN_setOutputValue(ledPinHandle, Board_PIN_LED0, !PIN_getOutputValue(Board_PIN_LED0));
}
}
void tx_callback(RF_Handle h, RF_CmdHandle ch, RF_EventMask e)
{
if(e & RF_EventLastCmdDone)
{
//PIN_setOutputValue(ledPinHandle, Board_PIN_LED0, !PIN_getOutputValue(Board_PIN_LED0));
}
}
void *mainThread(void *arg0)
{
// RF Setting
RF_Object rfObject;
RF_Handle rfHandle;
RF_Params rfParams;
RF_Params_init(&rfParams);
// SPI Rx Setting
SPI_Handle slaveSpi;
SPI_Params spiParams;
SPI_Transaction transaction;
SPI_init();
if( RFQueue_defineQueue(&dataQueue,
txDataEntryBuffer,
sizeof(txDataEntryBuffer),
NUM_DATA_ENTRIES,
MAX_LENGTH + NUM_APPENDED_BYTES))
{
/* Failed to allocate space for all data entries */
while(true);
}
RF_cmdTxHS.pQueue = &dataQueue;
RF_cmdTxHS.startTrigger.triggerType = TRIG_NOW;
RF_cmdTxHS.startTrigger.pastTrig = 1;
RF_cmdTxHS.startTime = 0;
currentDataEntry = (rfc_dataEntryGeneral_t*)&txDataEntryBuffer;
currentDataEntry->length = SPI_MSG_LENGTH;
pPacket = ¤tDataEntry->data;
SPI_Params_init(&spiParams);
spiParams.frameFormat = SPI_POL0_PHA1;
spiParams.mode = SPI_SLAVE;
spiParams.transferCallbackFxn = SPIRxCallback;
spiParams.transferMode = SPI_MODE_CALLBACK;
spiParams.bitRate = 4000000;
slaveSpi = SPI_open(Board_SPI_SLAVE, &spiParams);
if (slaveSpi == NULL) {
while (1);
}
/* Request access to the radio */
rfHandle = RF_open(&rfObject, &RF_prop_hsm, (RF_RadioSetup*)&RF_cmdRadioSetup_hsm, &rfParams);
/* Set the frequency */
//{ "868.0 ", 0x0364, 0x0000, 0x0 },
//{ "915.0 ", 0x0393, 0x0000, 0x0 },
RF_cmdFs_preDef.frequency = 0x0393;
RF_cmdFs_preDef.fractFreq = 0x0000;
RF_postCmd(rfHandle, (RF_Op*)&RF_cmdFs_preDef, RF_PriorityNormal, NULL, 0);
/* Open LED pins */
ledPinHandle = PIN_open(&ledPinState, ledPinTable);
if(!ledPinHandle) {
/* Error initializing board LED pins */
while(1);
}
/* slave Ready pin */
slaveRdyHandle = PIN_open(&slaveRdyState, slaveRdyTable);
if(!slaveRdyHandle) {
/* Error initializing button pins */
while(1);
}
/* master Ready pin */
masterRdyHandle = PIN_open(&masterRdyState, masterRdyTable);
if(!masterRdyHandle) {
/* Error initializing button pins */
while(1);
}
/* Initialize slave SPI transaction structure */
transaction.count = SPI_MSG_LENGTH;
transaction.txBuf = NULL;
transaction.rxBuf = (void *) slaveRxBuffer;
while(1)
{
transferOK2 = 1;
memset(slaveRxBuffer, 0, SPI_MSG_LENGTH + 1);
transferOK = SPI_transfer(slaveSpi, &transaction);
if (transferOK) {
while(!PIN_getInputValue(Board_DIO15));
PIN_setOutputValue(slaveRdyHandle, Board_DIO21, 1);
while(transferOK2);
PIN_setOutputValue(slaveRdyHandle, Board_DIO21, 0);
memcpy(pPacket, slaveRxBuffer, SPI_MSG_LENGTH + 1);
RF_postCmd(rfHandle, (RF_Op*)&RF_cmdTxHS, RF_PriorityNormal, NULL, 0);
}
else {
}
}
}