请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:DRV8305 主题中讨论的其他部件:MSP430G2553,
您好,先生,
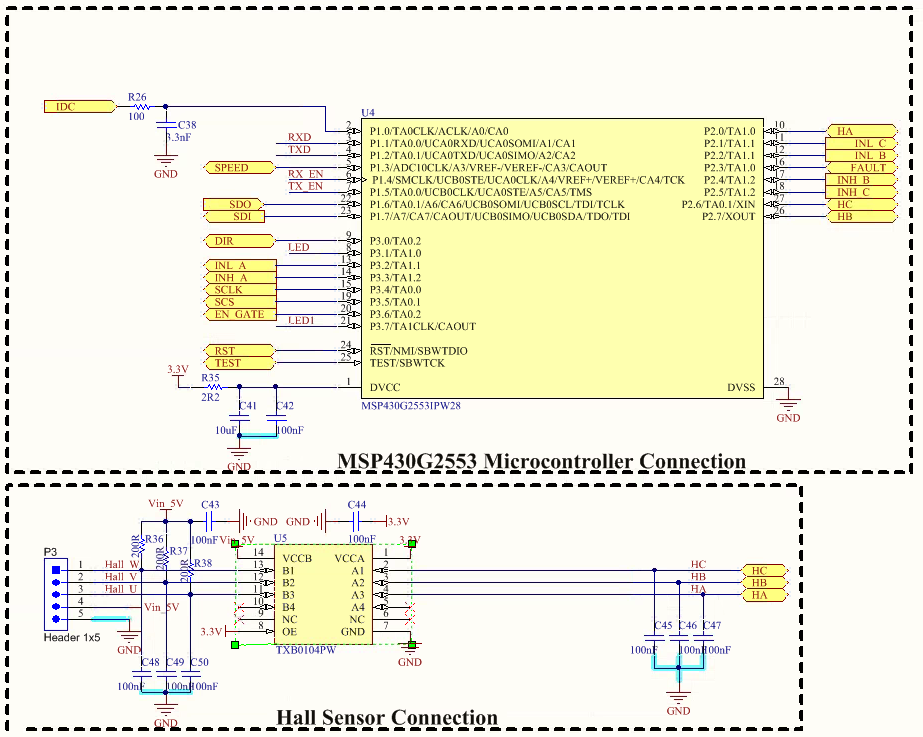
我使用DRV8305和MSP430G2553控制器来驱动BLDC。
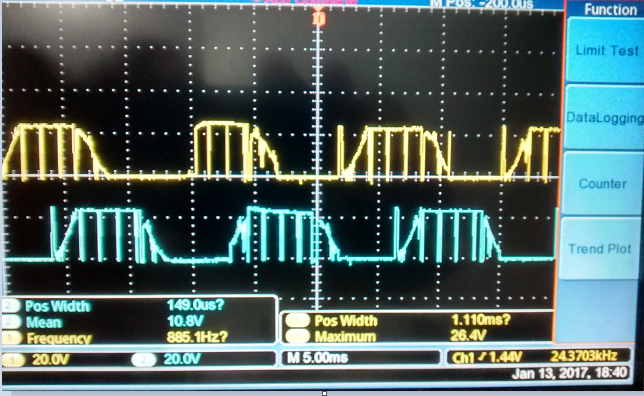
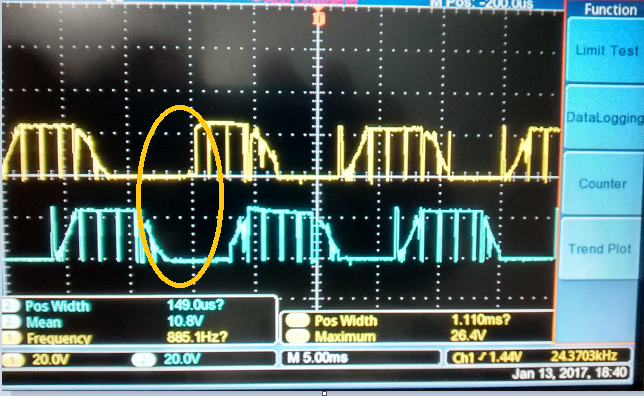
它运行几乎完美,但在某个时间点,BLDC电机内部会发出一秒钟的声音, 并且U,V和W相位的时间波形也会受到干扰。 此过程会重复进行,但不会定期执行。
在我的电路中,我使用 TXB0104PW将BLDC的霍尔传感器的5V信号转换为3.3V。 这是霍尔传感器电路的图像。

下面是我从TI参考设计之一的参考代码中获取的代码。
************
//系统配置
//器件部件号 :MSP430G2553
//编译器 :代码编辑器工作室5.5。0.0.0077万
//振荡器频率 16MHz,使用内部DCO
// PWM生成 :计时器A:1.2 ,16MHz,OUTMOD[2:0]=2,用于高侧FET的PWM
// :计时器A 1.1 ,16MHz,OUTMOD[2:0]=6,用于低侧FET
的PWM ////
位置反馈: 霍尔传感器信号
// HA -> WFP 2.0
// HB -> WFP 2.3
// HC -> WFP 2.6
//DRV8305
//SPI通信 :SDO -> WFP 1.1
// :SDI -> WFP 2.7 1.2 3.6
// :SCLK -> WFP 3.4
// :
FAULT ->USCO 3.5 // :EN_GATE -> WFP FAULT
-> FAULT -> FAO
/
#include <MSP430.h>
#include <stdint.h>
#include "drv8305.h"
void Init_Clocks ();
void Init_IOS (void);
void Init_ADC (void);
void Init_Timer (void);
void Init_COMP_A (void);
void Hall_State_Change_Forward (void);
void Hall_State_Change_reverse (void);
void a_PWM (void);
void B_PWM (void);
void C_PWM (void);
void a_low (void);
void B_low (void);
void C_low (void);
void A_Z (void);
void B_Z (void);
void C_Z (void);
void Readfault (void);
#define PWM_Period 400 //PWM Frequency (Hz)= 16MHz/(2*PWM_Period)-1)
#define MAX_DUTYCYCLE 400 //相对于PWM_Period
#define MIN_DUTYACCECLE 50 //相对于PWM_Period
#define ACCEL_RATE 500 //全周期PWM (PWM频率/PWM_Period
失效时间 1. //来自MSP430的死时间= dead_ty* 0.0625 us (用于16MHz时钟)
#define 挡块_转子_持续时间 3万 //BLOCKED_ROTOR关闭时间(s)= BLOCK_ROTOR_Duration*3万/计时器时钟频率
#define WantedDutyCycle 390 //unsigned int
DC_BUS_current = 0;//unsigned
int DC_Bus_Voltage = 0;
unsigned int speed_REF = 0;//unsigned
int Temperature_feedback = 0;//unsigned
int start_count =0;
volatile unsigned int hall_State = 0;
/unsigned
int wantedDutyCycle =30;
unsigned = unsigned
挥发性无符号int Direction=0;
//unsigned int FirstADC_flag =1;
//unsigned int ADC_selection_FLAG_1
=1;
unsigned int ADC_selection_FLAG_1 =1;unsigned int Block_Rotter_Counter =0;
unsigned int Block_Rotter_Counter_1 =0;
unsigned int addr1,addr2,addr3,Addr4;
/*********************** ADC信道选择******************************************* /
#define measure_speed() { ADC10CTL0 = ADC10SHT_1 + ADC10IE + ADC10ON; \
ADC10CTL1 = inch_3 + CONSEQ_0 + SHS_0; \
ADC10AE0 = BIT3; }/*
#define measure_TEMP() { ADC10CTL0 = ADC10SHT_1 + ADC10IE + ADC10ON; \
ADC10CTL1 = inch_4 + CONSEQ_0 + SHS_0; \
ADC10AE0 = BIT4; }
#define measure_VDC() { ADC10CTL0 = ADC10SHT_1 + ADC10IE + ADC10ON; \
ADC10CTL1 = inch_5 + CONSEQ_0 + SHS_0; \
ADC10AE0 = BIT5; }
#define measure_IDC() { ADC10CTL0 = ADC10SHT_1 + ADC10IE + ADC10ON; \
ADC10CTL1 = inch_6 + CONSEQ_0 + SHS_0; \
ADC10AE0 = BIT6; }
*/
#define conversion _enable() { ADC10CTL0 |= ENC + ADC10SC;}
#define conversion _disable(){ ADC10CTL0 &=~ENC; \
ADC10CTL1 = 0; }/***********************
主要内容************************************************************** /
void main()
{
WDTCTL = WDTPW + WDTHOLD;// 停止监视程序计时器以防止超时重置
Init_Clocks();
Init_IOS();
drv8305_init();
a_Z();
B_Z();
C_Z();
IF((P2IN & BIT3)== 0)
{
ReadRegister (0x01);
ReadRegister (0x02);
ReadRegister (0x03);
ReadRegister (0x04);ReadRegister (0x04);
//Readfault();
}
P3OUT |= BIT6;
Init_adc ();
// Init_COMP_A ();
Init_Timer ();
WDTCTL = WDTPW + WDTHOLD; //停止监视计时器以防止超时重置
__Delay_Cycles (100万);
hall_State =(P2IN和BIT0)+(
=(= P2IN和PB0)
;B3IN和PB0;PB0;= 6;PB0;B3IN和PB0;PB0;PB0;PB0;PB0;PB0;PB0;PB0;PB0;PB0;PB0;PB0和PB0;PB0;PB0;PB0;PB0;PB0;PB
while (1)
{
IF(direction ==1)
{
Hall_State_Change_forward();
}
else
{
Hall_State_Change_reverse();
}
IF(softstart_counter == ACCEL_RATE)
{
softstart_counter =0;
IF((P3IN & BIT0)== 1)
{
IF ( CurrentDutyCycle <Wanted_Rate=){ DutyCycle=)}
{ DutyCycle=0;
}= DutyCycle { DutyCycle=}{ DutyCycle=0}{ DutyCycle=}{ DutyCycle=}{ DutyCycle=0;<=}{
}
}}}}/**************************
正在初始化ADC *************************************** /
void Init_adc (void)
{
ADC10CTL0 = ADC10SHT_0 + ADC10ON + ADC10IE;// ADC10ON,中断已启用
ADC10CTL1 = inch_3; //}/**************************
正在初始化GPIO*************************************** /
void Init_ios (void)
{
//霍尔传感器输入
P2SEL &=~(BIT0+BIT6+BIT7); //GPIO -霍尔传感器
P2DIR &=~(BIT0+BIT6+BIT7); //输入-霍尔传感器
//PWM输出
P2OUT |=(BIT1+BIT2+BIT2+BIT4+BIT2+P3P3P=
~/ SEL= P3PBIT3PBIT3PB3PBIT7=/ PBIT3PBIT3PB1= PBIT3PBIT3PBIT2+P3PBIT2= PBIT3PBIT3PBIT3PBIT2= PBIT3PBIT3PBIT3PBIT3PBIT3PBIT2= PBIT3PBIT2+PBIT3PBIT3PBIT2= PBIT3PBIT3PBIT2= PBIT2= PBIT3PBIT3PBIT3PBIT2= PBIT
P3DIR |= BIT7; //LED1
//DRV8305
P2SEL &=~(BIT3); //GPIO -故障
P2DIR &=~(BIT3); //输入-故障
//P3SEL ||(BIT6); //GPIO -EN_GATE
P3DIR ||(BIT6); //输出
=~/PB1TIF=
~/输出= PB1TIF=/PBITO=
//SCLK
P3OUT &=~BIT4;
P3DIR || BIT5; //NSC
P3OUT |= BIT5;
//Indications
P3SEL &=~Ω(BIT1); //GPIO -LED3
P3DIR ||(BIT1); //Output-LEDIR
//方向控制
P3SEL &=~Ω
(BITS1)~/端口
(PIT0) PIT0 (PIR=/) //边缘检测高=下降边缘,低=上升边缘
P2IFG &=(~BIT0)+(~BIT6)+(~BIT7); //消除引脚2.0 ,2.6 和2.7 IFG
P2IE |=(BIT0)+(BIT6)+(BIT7); //启用输入引脚2.2 ,2.3 和2.4 上的中断
********_ENTIF**
正在初始化计时器*************************************** /
void Init_Timer (void)
{
TA1CCR0 = PWM_Period;// 加载参考计数
TA1CCTL2 = OUTMOD_2;// 高侧PWM
TA1CCR2 =50;
TA1CCTL1 = OUTMOD_6;// 低侧PWM
TA1CCR1 =50; //使用零
TA1CTL初始化TA1CTL = Tassel/CLMC+TA3 ,CL_Timer + TASK + TASH_CL/TA3 计时器中断开
//TA1CCTL0 = CCIE;
WDTCTL = WDT_MDLLY_32; //大约2ms间隔
IE1 |= W技工 经; //启用WDT中断
_EINT(); //启用中断
}/******************
正在初始化时钟*************************************** /
void Init_Clocks (void)
{
BCSCTL1 = CALC1_16MHz; //设置DCO ~ 16 MHz
DCOCTL = CALDCO_16MHz;
BCSCTL1 || DIVA_1; // aclk/(0:1,1:2,2:4,3:8)
BCSCTL3 |= LFXT1S_2; // LFXT1 = VLO
}/******************
端口(霍尔传感器)中断维修例行程序*************************************** /
#pragma vector=port2_vector
__interrupt void Port_2 (void)
{
Hall_State =(P2IN & BIT0)+((P2IN & BIT6)>>4)+((P2IN & BIT7)>>6);
IF (direction ==1)
{
Hall_State_Change_forward();
else
{ Hall_State_Bit7)}>6)BIT+)=}BIT7
^ //将霍尔中断更改为下降边缘,以检测两个边缘
P2IFG &=(~BIT0)+(~BIT6)+(~BIT7); //清除中断标志
}/**********
计时器中断向量*************************************** /
#pragma vector = Timer1_A1_vector
__interrupt void Timer1_A1_ISR (void)
{
SWITCH(__偶 数_in_range(TA1IV,0x0A))
{
CASE TA1IV_NONE:中断; //矢量0:无中断
CASE TA1IV_TACR1:中断; //矢量2:TACR1 CCIFG
CASE TA1IV_TACCR2:中断; //矢量4:TACR2 CCIFG
CASE TA1IV_6:中断; //向量6:保留的CCIFG
CASE TA1IV_8:中断; //向量8:保留的CCIFG
CASE TA1IV_TAIFG: //矢量10:TAIFG
// TA1CCR2 =(CurrentDutyCycle);
// TA1CCR1 = CurrentDutyCycle;
TA1CCR2 =(CurrentDutyCycle -deed_time);
TA1CCR1 = CurrentDutyCycle;
IF ((P2IN和BIT3)= 0)
{
P3OUT &=~(BIT6);
Readfault();
}
中断;
默认: break;
}}}/******************
ADC中断*************************************** /
#pragma vector=ADC10_vector
__interrupt void ADC10_ISR (void)
{
speed_REF =(ADC10MEM>>1);
conversion _disable();
}/******************
换向顺序前进*************************************** /
void Hall_State_Change_Forward (void)
{
switch (Hall_State)
{
案例2:
A_PWM();
B_low();
C_Z();
Break;
案例6:
A_PWM();
c_low();
B_Z();
中断;
案例3:
c_PWM();
B_low();
A_Z();
中断;
案例1:
c_PWM();
a_low();
B_Z();
中断;
案例4:
B_PWM();
C_LOW ();
A_Z ();
中断;
案例5:
B_PWM();
A_low();
C_Z();
中断;
默认:
A_Z();
B_Z();
C_Z();
Break;
}}}/******************
换向顺序倒档*********************************************** /
void Hall_State_Change_reverse (void)
{
switch (hall_State)
{
案例2:
b_PWM ();
a_low ();
C_Z ();
break;
案例6:
c_PWM ();
a_low();
B_Z();
中断;
案例3:
b_PWM();
C_low();
A_Z();
中断;
案例1:
A_PWM();
C_low();
B_Z();
中断;
案例4:
C_PWM();
B_LOW ();
A_Z();
中断;
案例5:
A_PWM();
B_low();
C_Z();
Break;
default:
A_Z();
B_Z();
C_Z();
Break;
}}}/******************
PWM GPIOs的定义*********************************************** /
void a_wm (void)
{
P3SEL || BIT3;
P3SEL || BIT2;
}
void B_PWM (void)
{
P2SEL || BIT4;
P2SEL || BIT2;
}
void C_PWM (void)
{
P2SEL || BIT5;
P2OUT || BIT1;
void A_low( void)
~
B3IT2=~PB3SEL
=~
void B_low(void)
{
P2SEL &=~BIT4;
P2OUT &=~BIT4;
P2SEL &=~BIT2;
P2OUT |= BIT2;
}
void C_low(void)
{
P2SEL &=~BIT5;
P2OUT &=~BIT5;
P2OUT &=~BIT1;
~3PSE=
~3PB3;
~SEL=
~
void B_Z(void)
{
P2SEL &=~BIT4;
P2OUT &=~BIT4;
P2SEL &=~BIT2;
}
void C_Z(void)
{
P2SEL &=~BIT5;
P2OUT &=~BIT5;
P2SEL &=~BIT1; P2OUT
&=~BIT01;~= 1;
REGADDR03=0X01; REG; REG; RED02=021(REG1;RED01;REG1;RED02=01;REG;RED01;REG;RED01;RED01;REG;RED01;REG;RED01;REG;REG
完**************************************************************** /
请帮我解决这个问题。 您还可以指出代码中的错误。
谢谢你。
此致,
Dinesh JINJALA