请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV2604L 主题中讨论的其他器件:DRV2604
您好、专家、
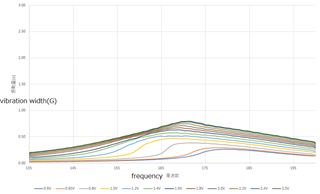
MT 客户遇到输出波形问题。
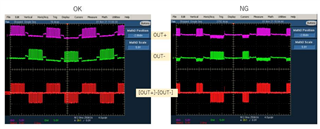
这是由一些电机发生的、即使电机器件型号相同、它们也具有正常的电机和 NG 电机。 他们尝试更换另一个电机、因此、此问题得到了改善。
此外、该问题通常在低温条件下发生。 (0C 时、2/6件 NG)
您能否就该波形的原因向我提供建议?
哪些电机特性取决于此问题?
谢谢
穆克