请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8306EVM 主题中讨论的其他器件:DRV8306、 DRV8316、 DRV10987、 DRV10970、 CSD88584Q5DC、 LMD18200
您好!
我不熟悉 BLDC 电机、最近在这里发布了我的第一个问题:无传感器 BLDC 控制:

根据 Matt Hein 的有用回答、我决定尝试使用 DRV8306作为起点的传感式趋势控制。
我现在有了 DRV8306EVM 板并已开始测试、但我遇到了使电机旋转的问题。 当我使用 POT 缓慢提高转速时、转子有时会稍微移动并振荡。 如果我尝试提高速度、我可以看到为 VM 供电的 PSU 上消耗了高电流(因此我还没有将其调到很远的位置)。
下面是 DRV8306EVM 设置方法的图片。

注:
霍尔效应连接
- 我的电机使用 Honeywell S41F 传感器、这些传感器是单端电流吸收传感器、需要最低4.5V 的电源电压。
- 因此、我移除了跳线 JP1并为 JP1-2提供5V 电压(红线)、还将0V 电压从5V PSU 连接到 HGND (绿线)
- 连接到霍尔连接端子的红色和黑色导线分别为 HPWR 和 HGND、蓝色导线为霍尔 A、黄色导线为霍尔 B、白色导线为霍尔 C
- 对于单端霍尔信号、开关 S3处于正弦位置
- 当我手动旋转电机时、每个霍尔输入(A+、B+、C++)根据转子位置在2.4V 和 OV 之间变化。 [注意:它是一个8极(4极对)转子]
电机连接
- A =红线= U 相
- b =棕色线= V 相
- C = G/Y 导线=相位 W
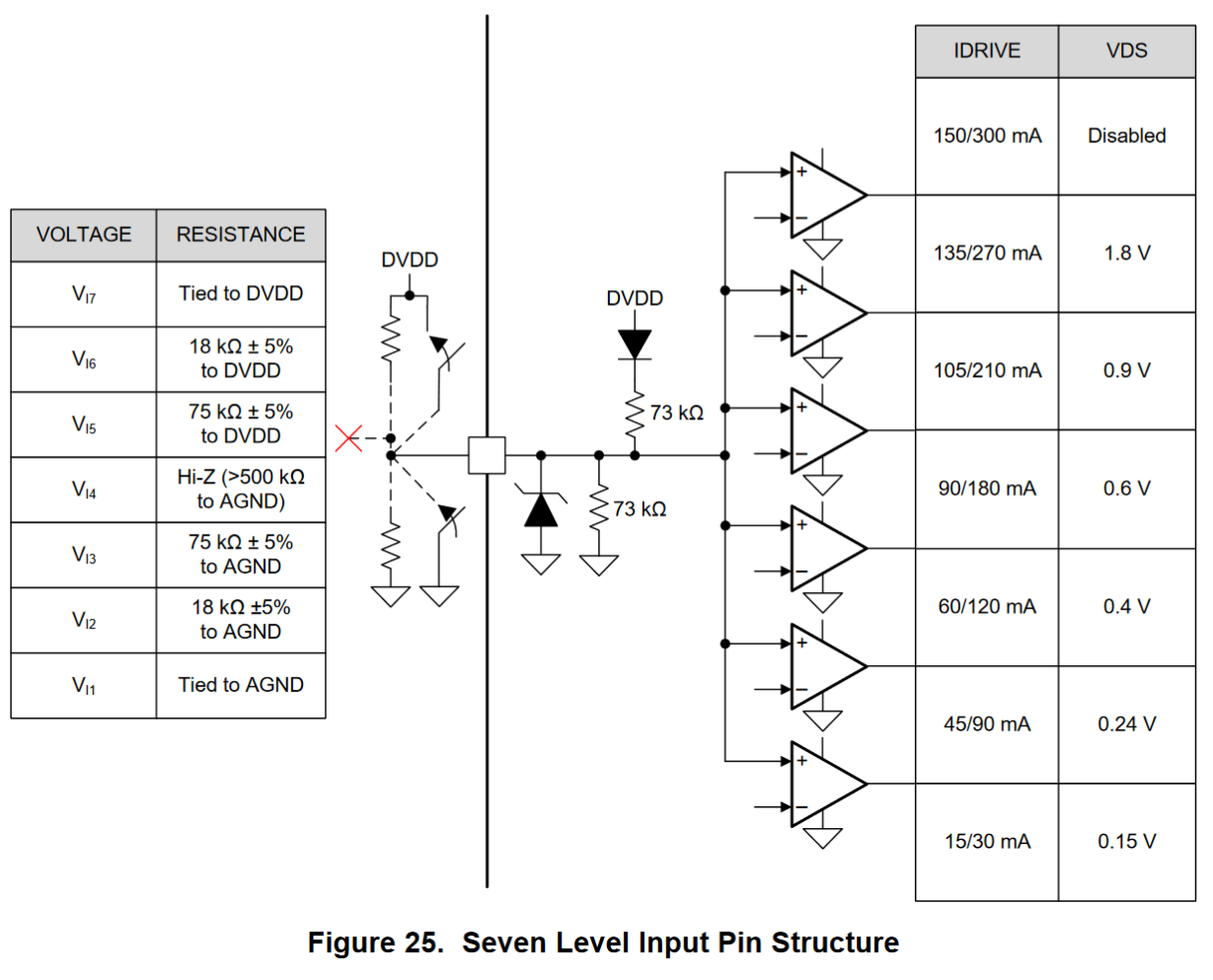
IDRIVE 和 VDS 跳线
- 《DRV8306EVM 用户指南》提到、这些器件的默认设置为无跳线、因此我遵循了该设置。 但不确定这是否是最佳起点?
其他
- VM = 24V 直流
- 电机当前无负载。 它最终将驱动泵头,但它被拆除了,现在只能自由旋转……至少我希望它能自由旋转! )
- 我已经使用我在这里拥有的另一个演示板(来自不同的供应商)测试了电机、使其运转正常-所以我认为电机正常。
如前所述、当我为系统加电时、缓慢转动速度调节电位计-转子有时会稍微移动、然后停止、并在该点振动/振荡。 其他时候、它看起来是静止的、但当我保持转子时、我可以感觉到振荡。 在这种情况下、如果我手动尝试旋转转子、转子也会感觉"锁定"/很难转动。 同样、如上所述、如果我进一步提高速度、我可以看到电源上消耗的电流很高。 在空载条件下(使用不同的演示板)、电机在自由旋转时的电流消耗约为0.6A、但当我尝试使用 DRV8306EVM 稍微调高速度时(因此我没有尝试进一步调高速度)、电流消耗仅为4A 以上。
遗憾的是、我目前没有示波器、但如果有助于发现问题、可以获得示波器。
任何关于我所做的错误的想法或任何其他意见都很好-谢谢!