


请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8320 主题中讨论的其他器件: INA202
工程师好、
我将围绕 DRV8320和 Raspberry Pico 设计60A BLDC 控制器。 为了简化固件、我选择1xPWM 模式。
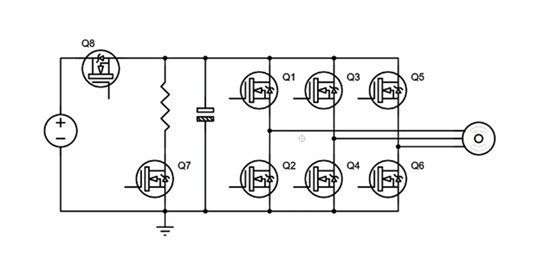
上图显示了原理图的简化。 Q1-Q6由 DRV8320控制、而 Q7和 Q8由 Raspberry Pico 控制。
根据我可以提供的信息、我有三种制动方法:
使用 DRV8320制动引脚、可打开 Q2、Q4和 Q6
2.使用电阻制动、 将方向销反向放置、同时关闭 Q8并打开 Q7
3.再生制动、将方向销反向放置、同时保持 Q8打开。 监视总线电压并在电压超过阈值时将 Q7开路(并关闭 Q8)。
假设我需要 将方向引脚反向放置、同时仍应用 PWM、我是否正确?
PWM 占空比对再生制动有什么影响?
