

在选择电机驱动器时、了解电机参数非常重要、因为 FET 的额定值和电机驱动器的控制方法取决于电机参数和结构。 电机具有数据表中列出的电气和机械参数、因为它是一种将电能转换为机械能的机电机器。
显示电气和机械参数的无刷直流(BLDC)电机的电路模型如图1所示。
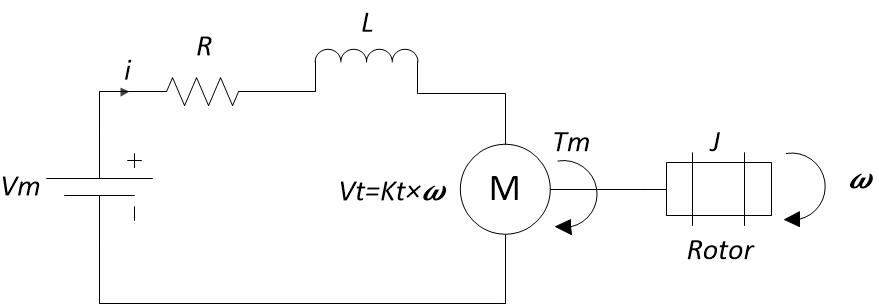
图1. BLDC 电机的电路模型
下表列出并解释了 BLDC 电机的电气和机械参数。
|
电气参数 |
典型符号 |
和功能 |
定义 |
|
额定电压 |
虚拟机 |
电压 |
施加到电机相位的额定电压。 |
|
额定电流 |
一 |
电流 |
电机在以额定转矩加载时消耗的电流。 |
|
无负载电流 |
INL |
电流 |
电机轴上无负载时电机消耗的电流。 |
|
峰值电流/堵转电流 |
IPK |
电流 |
电机轴锁定时电机消耗的电流。 |
|
反电动势常数 |
KT |
V/Hz 或 v/rpm 或 v/rad/s |
定子绕组上的感应电压 VT 为1Hz 或1rpm 或1rad/s |
|
定子/绕组电阻 |
R |
Ω μ A |
两个相位上的电阻。 |
|
定子/绕组电感 |
L |
h |
两相之间的电感。 |
|
机械参数 |
典型符号 |
和功能 |
定义 |
|
额定速度 |
Hz 或 rpm 或 rad/s |
电机的额定速度。 |
|
|
额定扭矩 |
TM |
nm |
电机在额定速度下产生的扭矩。 |
|
失速扭矩 |
终端 |
nm |
锁定转子的最大负载扭矩。 |
|
转子惯性 |
j |
oz-in s2/N-m-s2. |
转子惯性矩。 这对于确定加速和减速速率、系统动态响应以及计算转子的机械时间常数非常有用。 |
表1. BLDC 电机的电气和机械参数。
如何根据电机数据表中提供的信息选择 BLDC 电机驱动器?
根据电机电压和电流额定值确定集成 FET 的电压和电流额定值是选择电机驱动器的第一步。
以下是选择具有集成 FET 架构的电机驱动器时应考虑的电机数据表中的参数。
- 额定电压 VM
- 峰值电流 IPK
电源电压与(绝对最大值)的关系和集成 FET 器件的峰值输出电流(在表2中列出)应与电机的额定电压 VM 和峰值电流 IPK 进行比较。 Vs 和应略大于 VM 和 IPK。
以下是选择具有集成控制架构的电机驱动器时应考虑的电机数据表中的参数。
- 额定电压 VM
- 峰值电流 IPK
- 额定电流 I
- 反电动势常数 Kt
- 定子电阻 R
- 定子电感 L
与集成 FET 器件类似、集成控制器件的 Vs 和 IS 应略高于 VM 和 IPK。 R、L 和 KT 等电机参数用于集成控制器件的电机控制算法。 电机数据表中的 R、L 和 KT 应处于集成控制器件可支持的 R、L 和 KT (表2中列出)的适用范围内。
|
器件 |
架构 |
电源电压与 |
峰值电流是多少 |
电机相间电阻 |
电机相间电感(mH) |
BEMF 常数 Kt (mV/Hz) |
|||
|
绝对最大值 |
绝对最大值 |
最小 |
最大 |
最小 |
最大 |
最小 |
最大 |
||
|
DRV8313 |
集成 FET |
65 |
3. |
不适用 |
不适用 |
不适用 |
|||
|
DRV8312 |
集成 FET |
70 |
6.5. |
||||||
|
DRV8332 |
集成 FET |
70 |
13. |
||||||
|
DRV10964 |
集成控制 |
5.5. |
0.875 |
5. |
20. |
0.05 |
1 |
1 |
100 |
|
DRV10970 |
集成控制 |
18 |
1.5 |
不适用 |
不适用 |
不适用 |
不适用 |
不适用 |
不适用 |
|
DRV10974 |
集成控制 |
20. |
2.5. |
2. |
40 |
0.07. |
|
5. |
150 |
|
DRV10975 |
集成控制 |
18 |
2. |
0.6. |
24 |
0.07. |
|
1 |
1800 |
|
DRV10983 |
集成控制 |
28. |
3. |
0.6. |
38. |
0.07. |
|
1 |
1800 |
|
DRV10983-Q1 |
集成控制 |
28. |
3. |
0.6. |
38. |
0.07. |
|
1 |
1800 |
|
DRV10987 |
集成控制 |
28. |
3. |
0.6. |
38. |
0.07. |
|
1 |
1800 |
表2. 集成 FET 和集成控制器件参数。
有关更多详细信息、请参阅 《无刷直流电机驱动器注意事项和选择指南》。
