请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8426 Thread 中讨论的其他部件:、 DRV8428
尊敬的专家:
大家好、我叫 BYeongsu、Kang、负责空调模块的电路和控制。
我正在寻找一种方法来降低抖动性能、例如音频噪声或步进电机中的控制误差。 电机规格如下:
- 标称电压:12V
- 电阻:180欧姆
- 电感:90mH
- 步长:1.8度
- 齿轮箱:1:35和1:3.2
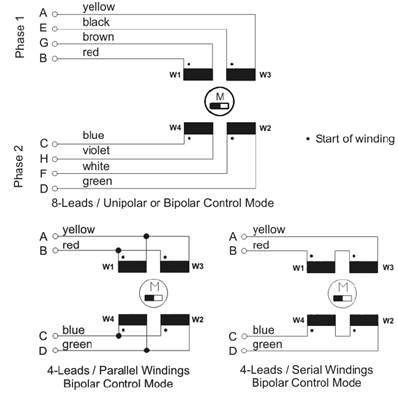
- 连接:4引线串行绕组双极
找到 DRV8426器件并使用 DRV8426EVM 执行主要功能测试。 设置参数如下所示;
- 软件:DRV84xx EVM
- 控制模式:步骤
- 步进模式:1/256步进
- VREF 电压:0.16V
- 速度:8000
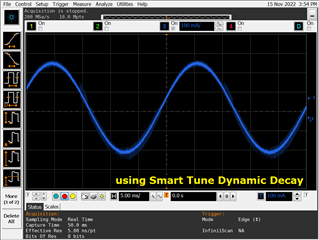
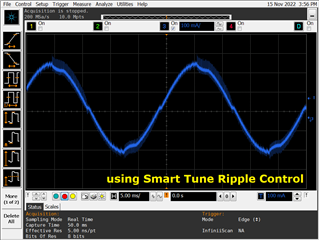
- 衰减模式:智能调优纹波控制
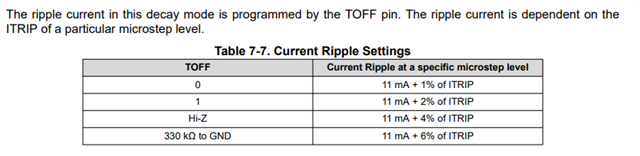
- TOFF:300千欧接地
- VM:12V
我使用示波器获得了以下结果、黄色线是 AOUT1的输出电压、绿色线是 BOUT1的输出电压、蓝色线是 AOUT1的输出电流。
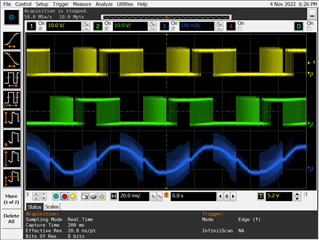
我控制 VREF 的值以降低抖动性能、这是最好的结果之一。 但是、我想进一步降低抖动性能。
问题1. DRV8426是否是控制上述电机的合适解决方案?
问题2. 如何降低蓝线中的高频系数(电流输出)? 该因素是否会影响抖动性能?
问题3. 我可以将电机连接更改为4引线并联绕组双极。 我猜规格会按如下方式更改;
- 电阻:45欧姆
- 电感:22.5mH
如果我将连接从串行更改为并行、抖动性能是否更佳?
请帮帮我。
谢谢、此致、
BYeongsu、Kang