


请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCT8316Z-Q1 主题中讨论的其他器件:DRV10970、 MCT8316Z、 MCT8316ZTEVM、 MCT8316A
话虽如此、您有关使用此电机控制器进行调优的文档需要进行修改、几乎需要完全重写。 它似乎适用于器件的非常旧的版本。
请原谅我、我还没有"调整"这个电机。 我现在打算这样做,或者至少尝试一下。 考虑到我得到的波形、我认为它不会很好地平移。
无论如何、我要做的是、我的电机已启动并在 MCT8316上运行。 它沿正确的方向旋转、具有相当强的强度、即使我尚未对其进行调优、但波形非常嘈杂、并且噪声会转化为电机的机械/音频噪声。 即使是空载、电机也会变得相当热、我无法想象它对电机有什么好处。 然而、更令人担忧的是、我连接到此控制器的电机即使完全没有负载、也需要0.5安培的电流才能旋转。 运行 DRV10970的相同电机就地运转(负载很小、基本上是在轴承上旋转一个自由轮)需要1/10的电流。 我已经拍摄了运行电压为7.5V 的 DRV10970波形和 MCT8316波形的图片。 我使用的 PWM 频率约为100kHz、略低于实际频率。 PWM 由555电路生成。
此外、如侧注所示、如果提供足够的负载、电机将突然切换方向、变得明显弱、并转速约为半速。 我怀疑调优可能会改变此行为。
从 W 线圈导线获取的 MCT8316迹线: 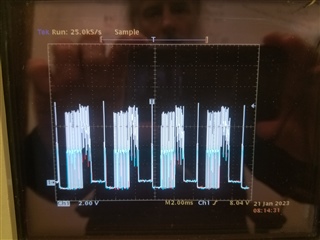
从 W 线圈导线获取的 DRV10970布线: 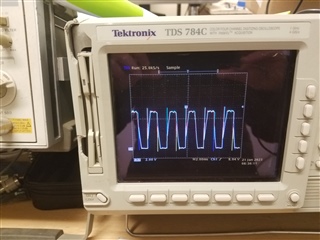
感谢您提供的任何信息。
