

电机参数的重要性
在驱动具有磁场定向控制(FOC)的无传感器三相 BLDC 电机时、控制算法使用电机参数创建电机的数学模型表示、以便估算转子位置和速度。 电机参数的精度直接影响估算转子位置的精度和无传感器 FOC 控制环路产生的转矩/性能/稳定性。
具体而言、无传感器 FOC 控制所需的关键电机参数为:
- 电机电阻
- 电机电感
- 电机反电动势常数
通常可以直接在电机数据表中获取这些参数。 然而、不同的电机数据表提供的参数标准或单位可能会略有不同。 例如、电机电阻有时可以用相间(也称为线对线)电阻表示。 如果电机控制算法希望用户提供电机的相电阻、则可能需要将该相间电阻除以2。
请务必检查所用电机控制算法要求的电机参数标准和单位。 例如、MCF8316A 集成无传感器 FOC 电机驱动器期望用户以 Ω 为单位输入电机相电阻、以 mH 为单位输入电机相电感、以 mV/Hz 为单位输入电机反电动势常数
测量电机参数
在没有数据表的情况下处理电机时、可以使用 LCR 表和示波器手动测量电机参数。
电机相电阻
电机相电阻是指等效的相位到中心抽头电阻 RPH、如下图所示。
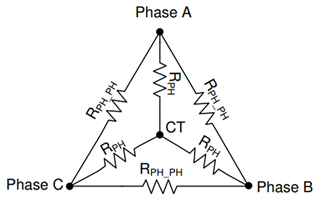
通过测量任何两个相位端子之间的相间电阻(RPH_PH)、然后将此值除以2、可以获得等效 RPH。 此测量对星形(也称为 Y 或 Y 形)绕线电机和 Delta (Δ)绕线电机均适用。
在星形/星形绕线电机中、如果用户可以接触到中心抽头(CT)、也可以在中心抽头(CT)和任何相位端子之间直接测量 RPH。
电机相电感
同样、电机相电感是指等效的相间抽头电感 LPH、如下图所示。
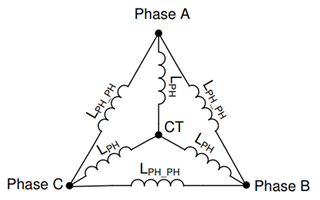
使用 LCR 表来测量任何两个相位端子 LPH_PH 上1kHz 时的相间电感、然后将该值除以2以获得等效相位电感 LPH = LPH_PH/2。
根据结构的不同、当转子处于不同位置时、某些电机可能具有不同的相间电感、这称为电机的电感/磁凸极。 在这种情况下、应测量全部三个相间电感并计算其平均值以用作相间电感、LPH_PH =(LA_B、+ LA_C + LC_C)/ 3。 然后将其除以2即可获得等效相位电感 LPH。
电机反电动势常数
电机反电动势常数描述了电机转速与生成的相位到中心抽头反电动势电压之间的比例关系、如下所示。
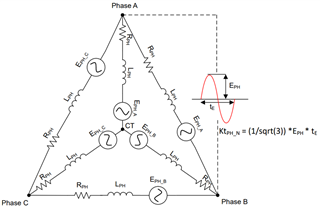
若要确定电机反电动势电压、请使用示波器并在电机的任意两相端子之间连接电压探头。 用手手动使电机自由旋转。 示波器上应出现正弦电压波形。 如上图所示、以毫伏为单位测量峰值振幅电压 EPH、以秒为单位测量时间周期 TE。 接下来、使用以下公式计算 BEMF 常数 Ke、单位为 mV/Hz:

