

无刷直流电机广泛应用于各个市场领域、整个行业正试图从有传感器解决方案转向无传感器解决方案、适用于不需要有传感器解决方案提供的紧密位置控制的应用。
在无传感器 BLDC 系统中、工程师通常需要可靠的电机停止选项、在开环后将电机减慢到停止、而无需依赖传感器进行位置反馈。 TI 具有磁场定向控制的集成控制 BLDC 驱动器(如 MCF8316A)具有可配置的电机停止选项、允许工程师配置驱动器在收到电机停止命令时的行为。
。 五 MCF8316A 中提供的配置包括惯性滑行(高阻态)模式、再循环模式、低侧制动、高侧制动、主动降速。 在这篇博文中、我们将介绍每种方法的工作原理、实施方法以及在选择特定的电机停止选项时需要考虑的一些关键问题。
快速浏览一下各电机停止选项之间的比较情况:
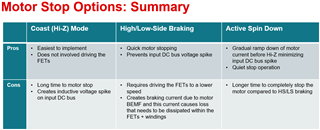
图1:电机停止运转选项:总结
滑行(高阻态)模式
选择此电机停止选项的工程师通常会选择该选项、因为这是涉及驱动 FET 的最简单的选项。 这种电机停止选项面临的挑战是、为了从电机中耗散能量、停止电机并通过电源产生电感尖峰很慢。 如果设计人员需要快速制动或其系统电源易受电压瞬变的影响、则不应选择此选项。
在 MCF8316A 上、通过将 MTR_STOP 设置为000b 来配置滑行(高阻态)模式。 收到电机停止命令后、MCF8316A 将通过关闭所有 MOSFET 转换为高阻态(高阻态)。 当 MCF8316A 从驱动电机转换为高阻态时、电机绕组中的电感电流继续流动、能量通过 MOSFET 输出级中的体二极管返回电源。
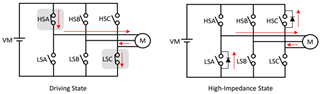
图2:滑行(高阻态)模式示例
在上面的示例中、电流通过高侧 A 相 MOSFET (HSA)施加到电机上、并通过低侧 C 相 MOSFET (LSC)返回。 当收到电机停止命令时、全部6个 MOSFET 都转换到高阻态、感应电能通过 MOSFET LSA 和 HSC 的体二极管返回供电。
再循环模式
选择此电机停止选项的工程师通常选择它、是因为该选项通过在 FET 中再循环来耗散能量、从而解决了滑行(高阻态)模式下的电感尖峰问题。 此电机停止选项面临的挑战是、它需要驱动 FET、并且您还必须在开始电机停止之前了解确切的转子位置。 如果您不知道转子位置、则会有非常高的电感尖峰。
通过将 MTR_STOP 设置为001b、在 MCF8316A 上配置再循环模式。 为了防止电感能量在电机停止期间返回直流输入电源、MCF8316A 会在特定的时间内选择性地关闭某些有源(导通) MOSFET、从而使电流在 MOSFET 内循环 (自动计算的再循环时间、以允许电感电流衰减为零)、然后通过关闭其余的 MOSFET 转换到高阻态。 如果高侧调制处于有效状态、则在发出电机停止命令之前、高侧 MOSFET 会在接收电机停止命令时关断、并且电流再循环会通过低侧 MOSFET 进行(请参阅示例图3)。 再循环时间消失后、低侧 MOSFET 也会关断、所有 MOSFET 均处于高阻态、如下图所示。
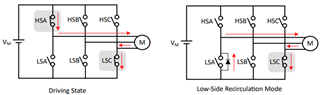
图3:低侧再循环模式示例
如果低侧调制处于有效状态、则在发出电机停止命令之前、低侧 MOSFET 会在接收电机停止命令时关闭、并且电流再循环会通过高侧 MOSFET 进行(请参阅示例图4)。 一旦再循环时间消失、高侧 MOSFET 也会关断、所有 MOSFET 均处于高阻态。 下图对此进行了说明。
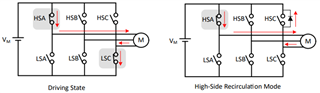
图4:高侧再循环模式示例
低侧制动
选择为其系统使用低侧制动的工程师选择了此选项、因为它允许电机快速停止(与再循环和惯性滑行相比)、同时防止电源泵回。 此电机停止选项面临的挑战是、它需要驱动 FET 并产生大量需要在系统内耗散的电感和反电动势电流。
MCF8316A 通过将 MTR_STOP 设置为010b 来配置低侧制动模式。 收到电机停止命令后、输出速度会降低到 ACT_SPIN_BRK_THR 定义的值、然后导通所有低侧 MOSFET、具体时间由 MTR_STOP_BRK_TIME 配置、如下面的图4所示。 如果在接收停止命令之前电机转速低于 ACT_SPIN_BRK_THR、则 MCF8316A 会直接转换至制动状态。 对 MTR_STOP_BRK_TIME 施加制动后、MCF8316A 会通过关断所有 MOSFET 转换至高阻态。
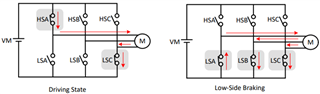
图5:低侧制动示例
MCF8316A 还可以通过制动引脚输入进入低侧制动。 当制动引脚拉至高电平状态时、在导通所有低侧 MOSFET 之前、输出速度会降低到由 BRAKE_DUTY_THRESHOLD 定义的值。 在这种情况下、MCF8316A 保持在低侧制动状态、直到制动引脚变为低电平状态。
高侧制动
与低侧制动类似、选择为其系统使用高侧制动的工程师选择了此选项、因为它允许电机快速停止(与再循环和惯性滑行相比)、同时防止电源泵回。 此电机停止选项面临的挑战是、它需要驱动 FET 并产生大量需要在系统内耗散的电感和反电动势电流。
通过将 MTR_STOP 设置为011b 来配置高侧制动模式。 收到电机停止命令后、在打开所有高侧 MOSFET (请参阅图6示例)之前、输出速度会降低到由 ACT_SPIN_BRK_THR 定义的值、持续时间由 MTR_STOP_BRK_TIME 配置。 如果在接收停止命令之前电机转速低于 ACT_SPIN_BRK_THR、则 MCF8316A 会直接转换至制动状态。 对 MTR_STOP_BRK_TIME 施加制动后、MCF8316A 会通过关断所有 MOSFET 转换为高阻态。
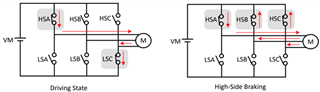
图6:高侧制动示例
主动降速
如果工程师在寻找比高侧和低侧制动更快的电机停止选项、则可以选择主动降速。 通过反向驱动 FET、与其他方法相比、电机可以快速停止。 此电机停止选项带来的挑战是、在此期间、驱动器会从电源消耗更多电流、这些电流需要由电机或 FET 在系统内耗散。
通过将 MTR_STOP 设置为100b 来配置主动降压模式。 收到电机停止命令后、MCF8316A 会将占空比降至 ACT_SPIN_BRK_THR、然后通过关闭所有 MOSFET 转换到高阻态。 此模式的优点是、通过减小占空比、电机可以减速到较低的速度、从而在进入高阻态之前降低相电流 现在、当电机转换到高阻态时、向电源的能量转移会减少。 阈值 ACT_SPIN_BRK_THR 需要配置足够高的电平、以使 MCF8316A 不会失去与电机的同步。
结论
电机停止选项设计不当会导致意外的电机瞬态尖峰、系统 FET 损坏或通过电源的电感电流尖峰。 在设计您的系统时、请考虑这篇博文中列出的内容以及它们如何影响您的整体设计。 有关电机停止选项以及如何针对您的器件对其进行专门配置的更多信息、请参阅器件数据表。 所有这些无传感器电机停止选项都可帮助工程师构建稳健的无传感器系统、希望这些简短的内容可以帮助您确定最适合您的系统的选项。
