请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8889-Q1 主题中讨论的其他器件: DRV8461EVM、
大家好、
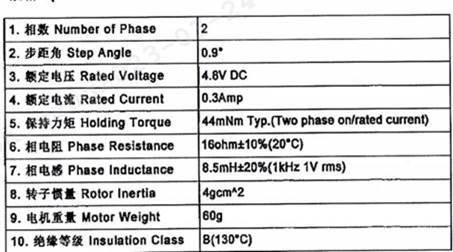
客户想要使用 DRV8889-Q1失速检测功能。 相应的电机规格如下所示:
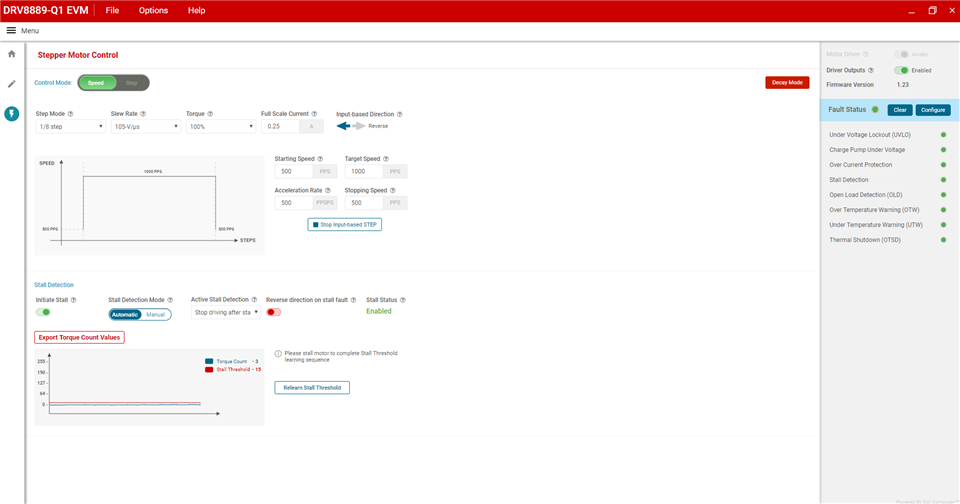
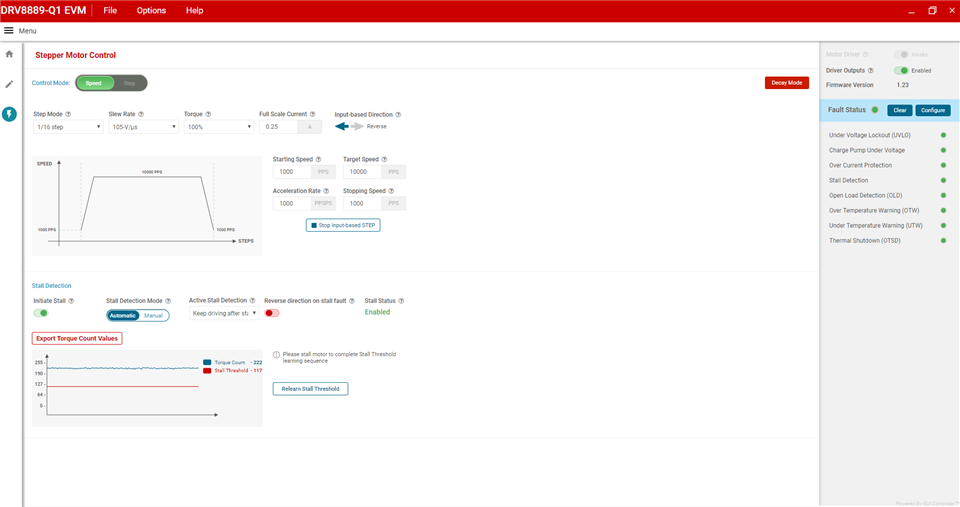
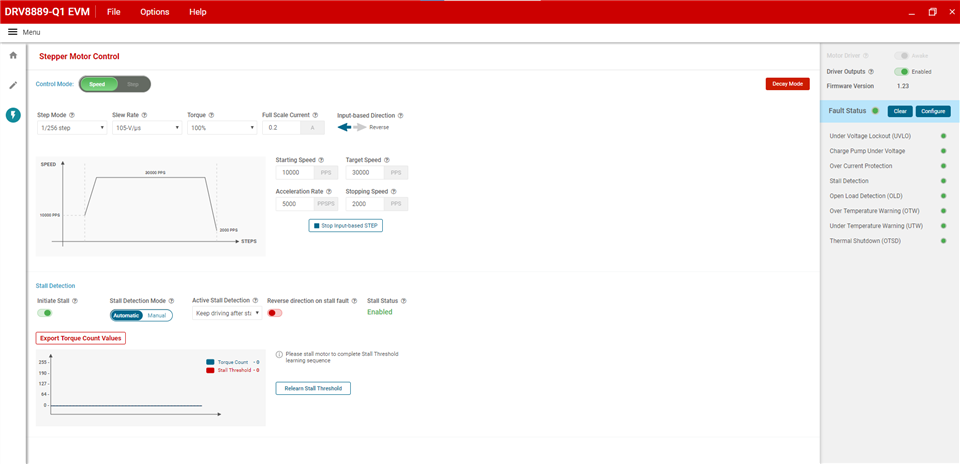
使用 DRV8889-Q1 EVM 进行测试、设置如下:
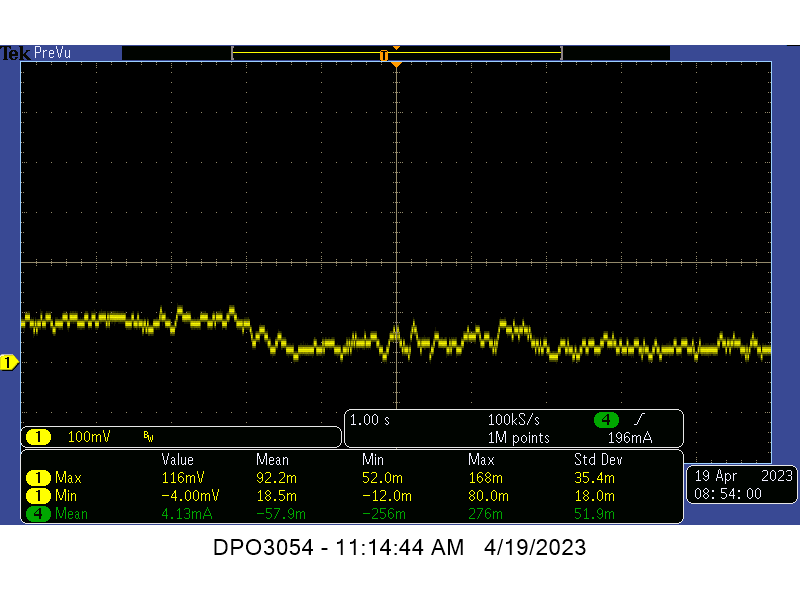
当停止电机手动时、扭矩保持0、无输出;
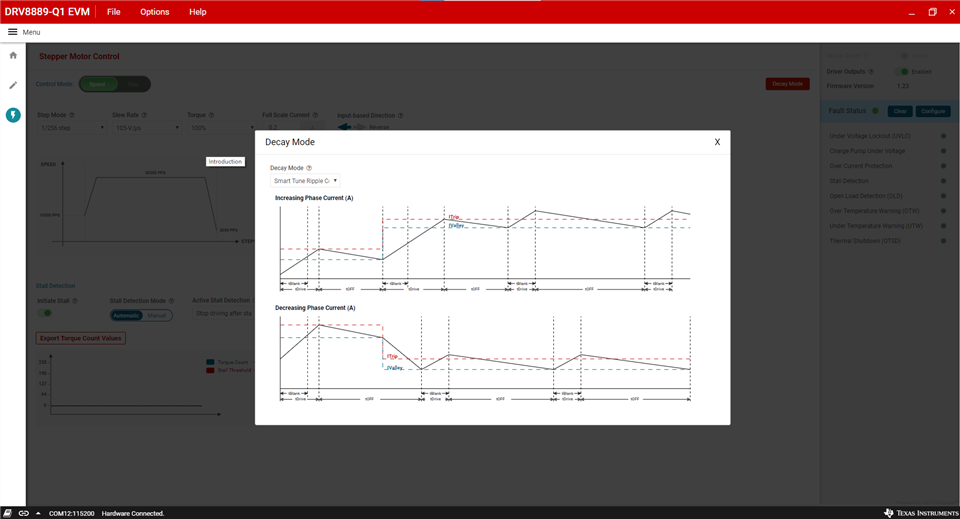
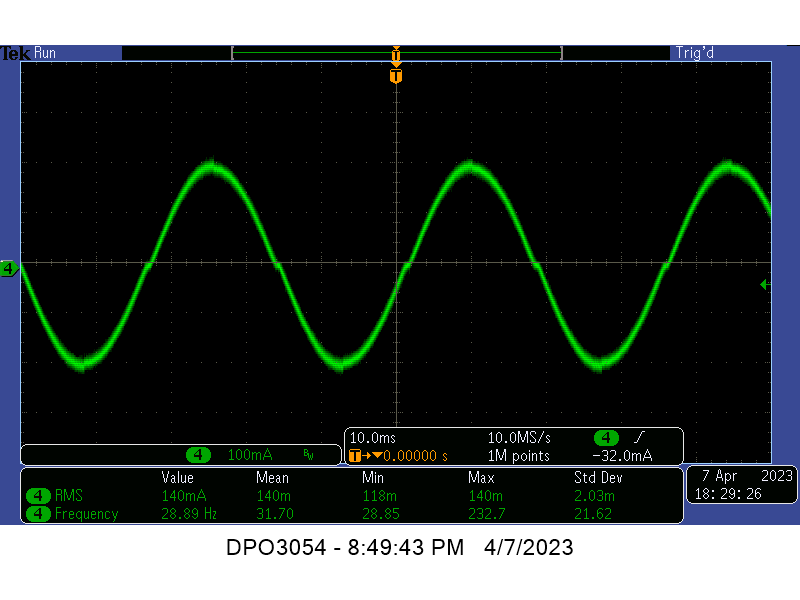
相电流如下所示:
您能帮助检查为什么在电机失速时没有数据输出吗? 如何解决该问题呢?
谢谢、此致、
怎样的
大家好、
客户想要使用 DRV8889-Q1失速检测功能。 相应的电机规格如下所示:
使用 DRV8889-Q1 EVM 进行测试、设置如下:
当停止电机手动时、扭矩保持0、无输出;
相电流如下所示:
您能帮助检查为什么在电机失速时没有数据输出吗? 如何解决该问题呢?
谢谢、此致、
怎样的