请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8434 主题中讨论的其他器件: DRV8711、 DRV8462、 DRV8462EVM、DRV8461、 DRV8452.
我正在使用 DRV8434在智能调优模式下运行采用48V (VM)和1.7 (IMAX)的 NEMA23电机。 3000pps 和8000pps2。
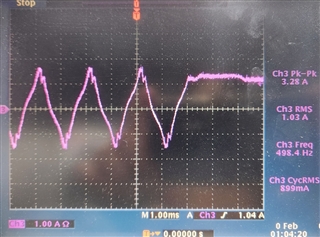
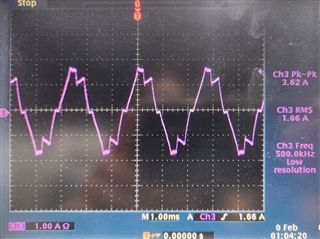
较低阶跃(1/4)的电机电流与较高阶跃(二者都连接)的电机电流是不可比拟的。
改变速度或 Vref 并不能使1/4步进变得 更好。
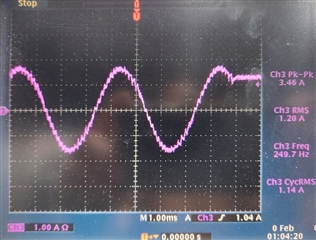
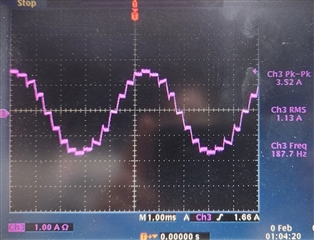
当我使用 DRV8434评估套件运行时、同样的电机可以提供非常平滑的1/4电机电流图形。需要注意的一点是、我的 STEP 信号持续4 μ s、而对于您的 DRV8434Eval 来说、它要大得多。
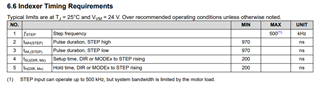
由于数据表指出步进频率为 0-50kHz、因此4usec 肯定没问题、对吧 ? 如果这是问题、那么它只在较低的步长上影响它呢? 我可以通过任何方法使它在1/4步长下正常运行吗?