请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8711 主题中讨论的其他器件: CSD88537ND、
您好!
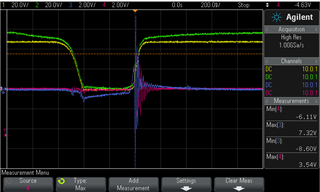
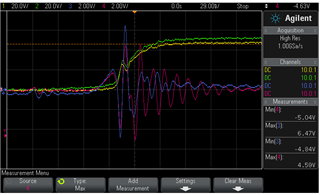
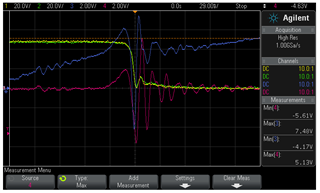
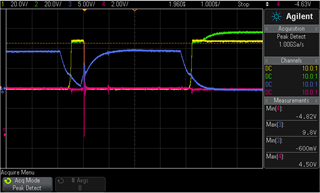
DRV8711存在问题、在某些情况下会损坏:启用电流调节(CTRL.ENABLE=1)后、将触发过流错误。 降低电流设定点(CTRL.ISGAIN、扭矩)或提高 OCP 设置值(DRIVE.OCPTH、DRIVE.OCPDEG)没有任何帮助。 我们必须更换 DRV8711 IC 以解决此问题、使 IC 似乎损坏。 启动运动(STEP 输入端的脉冲)时也会发生这种情况。 在某些情况下、会触发前置驱动器故障。
我们对静止和运动使用不同的衰减模式、主要是为了降低静止噪声。
在我们的部门很难重现此问题:它会不时地发生在客户身上。
我们的设计:
步进电机 NEMA 17:双空气、1.5A/相、2.4 Ω/相、2.6mH/相
DriverVoltage/VM:48V
FET:TI CSD88537ND
Rsense:0.05Ohm
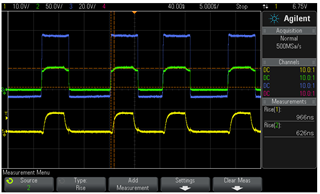
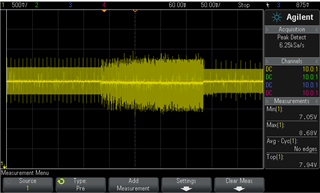
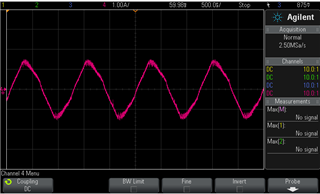
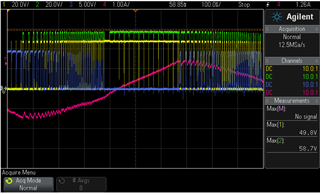
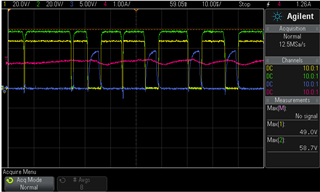
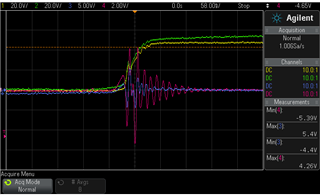
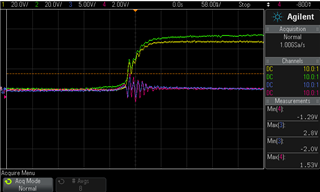
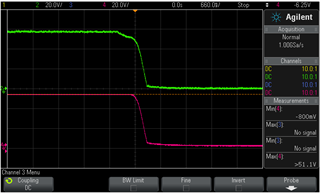
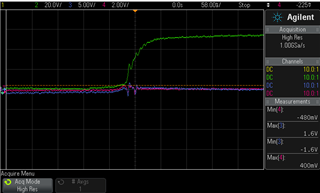
我们已根据可闻噪声和平滑度电流曲线(在示波器上测量 FET 输出电流)优化了 DRV8711设置:
DRV8711电机保持(静止)设置:

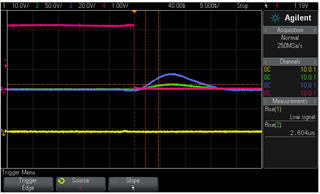
DRV8711电机运行设置(最大值:53000步/秒)
等于上述值、但存在以下情况:
- 衰减模式:混合
- 消隐时间:2.0µs μ s
- 关断 µs:4 μ s
您能解释一下损坏的 DRV8711发生了什么情况吗? 这是否可能是温度问题?