主题中讨论的其他器件: DRV8962、 DRV8329、DRV8312、DRV8353 、DRV8350
大家好。
我们使用 DRV8962EVM 实现三相 BLDC 电机的控制驱动器。
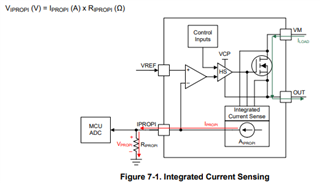
对于产品的电流监测功能、我们需要使用芯片/电路板的电流读数来评估流过电机的实际等效总电流、然后使用此公式。 当伺服环路触发一个特定电平时用于打开伺服环路的电流。
3个 BLDC 线圈由 PWM 以100KHz 的频率进行控制、4个 DRV8962EVM 输出中有3个使用 STM32f4微控制器。
在 通过在微控制器芯片上使用 ADC 初始实现 IPROPI、并在 BLDC 处于电机线圈端子(非增量配置)位置环路伺服下时监测电流检测值、然后使用正弦算法/公式执行换向后、我们获得以下观察结果: 和提出了有关如何使用这些值/信号来生成表示驱动器总电流等效的信号的相关问题:
观察结果:
1:3个值中对应于 BLDC 3个线圈的电流、具体取决于驱动器的位置(相位)。在伺服下向电机施加一个方向的外部力时、其中一个或两个值显示非零值、其余值显示零值。 在反转线性 BLDC 电机上施加力的方向时、另一个/两个 IPROPI 信号显示非零值。 但是、根据正弦换向、我们预计在大多数相位角位置、3个线圈的平均电流 I1、I2和 I3非零。 (这与单相或双相上的 IPROPI 零输出不一致)
2:我阅读了手册中的、电流检测用于 高侧 MOSFET。 但是、由于 MOSFET 以100KHz 的高频率进行开关、是否不应该对所有3个相位的电流读数取平均值并为所有相位提供非零值?
主要问题:
1-对于 DRV8962在高频下通过 PWM 控制三相 BLDC 旋转/线性电机时的应用、我们要使用什么确切模型/公式来推导等效电流信号 (这大约等于3个 IPROPI 模拟读数(对应于3个 BLDC 线圈)中的电机电力/扭矩?
非常感谢。
Amin Kamalzadeh