


请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
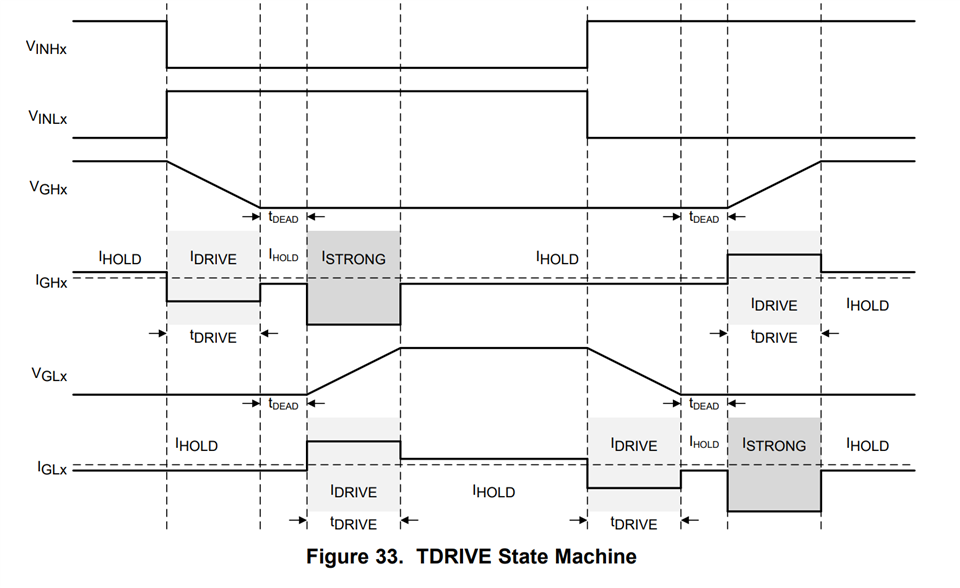
器件型号:DRV8353 大家好、使用6x PWM 模式、我们可以观察到高侧和低侧开关之间的死区时间似乎完全忽略了 Tdrive 和 Tdead 设置。 您能解释一下为什么会出现这种情况吗? 我得到的印象是、在6x 模式下、 VINHx 和 VINLx 直接决定栅极驱动器的状态、只有 Idrive 设置才有意义-这就是我们的跟踪显示的结果。 但是、我们尚不清楚芯片的数据表对此主题进行了说明。
3X PWM 模式的行为是否不同? 我们在数据表中找到的精确芯片(DRV8353)时序图表明是的。 由 VINHx 输入+ Tdrive + Tdead 决定的低侧栅极状态是合理的。
非常感谢您的帮助、让我们更清楚了解情况。
-S

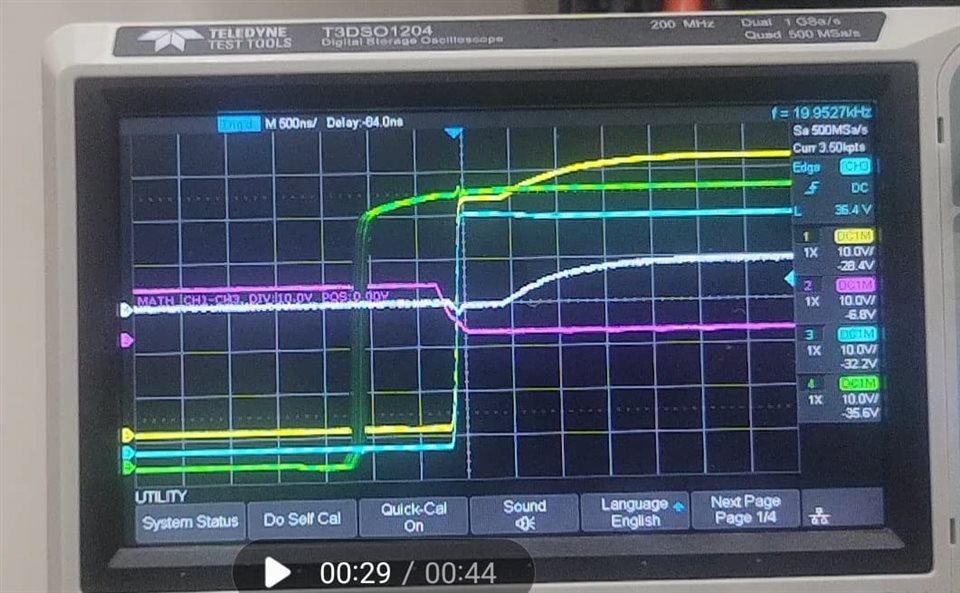
 HS 在开启前等待400ns、
HS 在开启前等待400ns、