请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8350H-EVM 主题中讨论的其他器件: DRV8353、 DRV8350
您好!
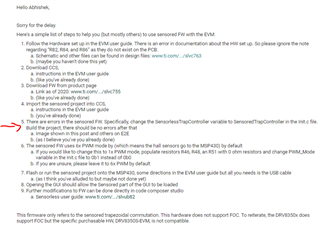
我正在尝试使用 DRV8350H-EVM 评估 DRV835x 驱动器的传感运行。 我执行了 EVM 用户指南(SLVUB78A) 和 https://e2e.ti.com/support/motor-drivers-group/motor-drivers/f/motor-drivers-forum/963560/ccs-drv8350s-evm-configuring-drv8350s-evm-for-sensored-mode#中提到的步骤。
我能够在将霍尔传感器连接到 J2的6* PWM 有传感器模式下使 EVM 正常工作。 但我无法让它在1* PWM 模式下工作、
下面是我为测试 1*PWM -霍尔传感器所做的操作
- 将霍尔传感器输入连接到 J2、焊接了未组装的电阻器 R46、R48和 R51 、阻值为0 Ω、并选择5V 用于霍尔传感器电源(J1)
- 将 Init.c 文件中的 PWM_Mode 变量更改为0b1,而不是0b0,生成并对目标进行编程
-
GUI 连接到 "含传感器电机"选项。 1*PWM 模式被选择。
-
当我 将电机转速(%)从0增加到18时、 故障状态指示灯指示电机失速
为了测试1*PWM -简单控制器, 我移除了电阻器,以便状态输入来自 MCU-GPIO。 但仍然无法使其在1*PWM 模式下工作
固件 https://www.ti.com/tool/download/SLVC755是否 支持1*PWM 操作(简单、霍尔传感器或两者)?
谢谢
纳杰玛