主题中讨论的其他器件:DRV10970,, MCF8316A
您好!
我们正在开发一种适用于需要高控制性能和低功耗的应用的产品。 我们的目标是使用速度控制器驱动-5000至+5000RPM 的速度范围内的 PMSM (永磁同步电机)、同时保持极小的抖动(小于1RPM)。 在低 RPM 时(例如、5或10 RPM)的精确速度控制对于我们的应用至关重要。
最初、我们评估了 DRV10970电机驱动器、该驱动器可为三相 BLDC (无刷直流)电机提供带传感器的正弦或梯形控制。 由于 DRV10970无需依赖 C2000微处理器并且无需代码即可运行、因此似乎是我们低功耗应用的理想之选。 然而、我们稍后发现 DRV10970将速度限制在10% PWM 命令以下(如数据表中所示)。 因此、我们无法使用该驱动器将电机驱动在大约500 RPM 以下。
作为替代方案、我们正在考虑 MCT8315Z 电机驱动器。 但是、我们无法确定它是否会在低速时遇到问题、以及它是否与我们的霍尔传感器布局兼容。 此外、虽然我们对 PMSM 更倾向于使用正弦电流、但如果梯形换向允许在低 RPM 下运行、则可以接受梯形换向。 您能否提供 MCT8315Z 的评估? 它是否具有与 DRV10970类似的低速限制?
我们还知道、由于无传感器电机驱动器(例如具有磁场定向控制的 MCF8316A)存在技术限制、因此不适合低 RPM。
您能否推荐最佳的电机驱动器和算法架构? 理想情况下、我们需要一个接受转矩命令、执行自己的电流环路控制并在低 RPM 下可靠运行的电机驱动器。 我们计划在单独的电路板上实施闭环速度控制器、在其中我们可以提供 PWM 或数字输入命令。 此外、我们可以在霍尔传感器旁边包含一个增量编码器。
提前感谢您的帮助。
电机规格:
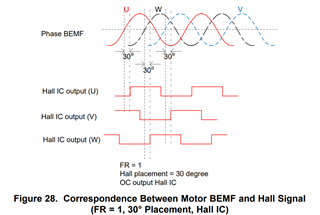
PMSM 特性:正弦反电动势(bemf)、30度霍尔放置和数字霍尔传感器、12V 标称电压、7个极对、0.66A 额定电流、相位6.95 Ω 和884uH。 如有需要、我们可以提供更多详细信息。
此致、
极汉