

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
主题中讨论的其他器件:DRV8353RS-EVM、DRV8353、 DRV8300U您好!
我正在 使用 DRV8353RS-EVM + LaunchXL-F280025C 为我的双轮 BLDC 集线器电机参考通用电机控制实验室测试/开发固件。 使用并联的评估板进行测试、而我的产品板准备就绪、可以支持比 DRV8353RS-EVM 更高的电流。
请帮助您在 user_mtr1.h 文件中定义电机相关参数。
我正在修改 .h 文件中的默认 Teknic_M2310PLN04K 段。
我的电机是一个两轮 BLDC 轮毂电机。 遗憾的是、电机数据表仅提供以下有关电机电气参数的信息。
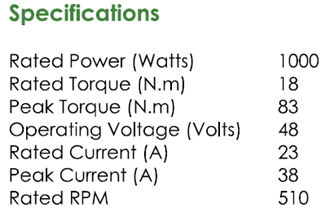
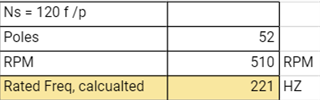
通过 用手短接两相线和旋转轴、可以发现极数为52。
计算额定频率如下
请参阅下表、我在其中尝试填写 user_mtr1.h 文件中所需的电机参数。 请 为该电机推荐新参数。
| 序列号 | #if (USER_MOTOR1 = Teknic_M2310PLN04K) | 轮毂电机 emfbl-10-48-1000-510 |
| 1 | #define USER_MOTOR1_TYPE MOTOR_TYPE_PM | |
| 2 | #define USER_MOTOR1_NUM_POLE_PAIRS (4个) | 26 |
| 3 | #define USER_MOTOR1_NULL Rr_Ohm (NULL) | |
| 4 | #define USER_MOTOR1_MOTORI Rs_Ohm (0.3955578f) | |
| 5 | #define USER_MOTOR1_LS_d_H (0.000190442806f) | |
| 6 | #define USER_MOTOR1_LS_Q_H (0.000190442806f) | |
| 7 | #define USER_MOTOR1_RATED_FLUX_VpHz (0.0399353318f) | |
| 8 | #define USER_MOTOR1_MAGNETIZING_CURRENT_A (NULL) | |
| 9 | #define USER_MOTOR1_RES_EST_CURRENT_A (1.5f) | |
| 10 | #define USER_MOTOR1_IND_EST_CURRENT_A (-1.0f) | |
| 11 | #define USER_MOTOR1_MAX_CURRENT_A (6.6f) | 23 (我现在可以进去15吗? 评估板限制) |
| 12 | #define USER_MOTOR1_FLUX_EXC_FREQ_Hz (60.0f) | |
| 13 | #define USER_MOTOR1_INERTIA_Kgm2 (7.06154e-06) | |
| 14 | #define USER_MOTOR1_RATED_VOLTAGE_V (24.0f)// V | 48 |
| 15 | #define USER_MOTOR1_FREQ_MIN_Hz (9.0f)// Hz | |
| 16 | #define USER_MOTOR1_FREQ_MAX_Hz (600.0f)// Hz | 221 |
| 16 | #define USER_MOTOR1_FREQ_LOW_Hz (5.0f)// Hz | |
| 19 | #define USER_MOTOR1_FREQ_HIGH_Hz (4000.0f)// Hz | |
| 19 | #define USER_MOTOR1_VOLT_MIN_V (1.0f)//伏特 | |
| 20 | #define USER_MOTOR1_VOLT_MAX_V (24.0f)//伏特 | |
| 21 | #define USER_MOTOR1_FORCE_DELTA_A (0.05f)// A | |
| 22 | #define USER_MOTOR1_ALIGN_DELTA_A (0.01f)// A | |
| 23 | #define USER_MOTOR1_FLUX_CURRENT_A (0.5f)// A | |
| 24 | #define USER_MOTOR1_ALIGN_CURRENT_A (1.5f)// A | |
| 27 | #define USER_MOTOR1_STARTUP_CURRENT_A (3.5f)// A | |
| 28 | #define USER_MOTOR1_Torque_CURRENT_A (3.0F)// A | |
| 28 | #define USER_MOTOR1_OVER_CURRENT_A (7.5f)// A | |
| 29 | #define USER_MOTOR1_SPEED_START_Hz (35.0f)// Hz | |
| 30 | #define USER_MOTOR1_SPEED_FORCE_Hz (30.0f)// Hz | |
| 31 | #define USER_MOTOR1_ACCEL_START_Hzps (10.0f)// Hz/s | |
| 32 | #define USER_MOTOR1_ACCEL_MAX_Hzps (20.0f)// Hz/s | |
| 33 | #define USER_MOTOR1_SPEED_FS_Hz (3.0F)// Hz | |
| 34 | #define USER_MOTOR1_BRAKE_CURRENT_A (1.0f)// A | |
| 35 | #define USER_MOTOR1_BRAKE_TIME_DELAY (12000U)// 60s/5ms |
谢谢。此致、
阿尼尔
