请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430FR2512 您好!
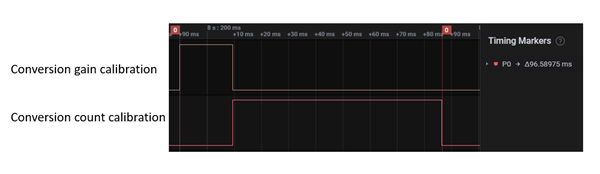
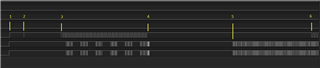
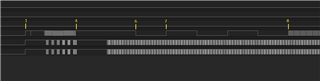
与 REGISTER_I2C 成功通信后、我遇到了一个新的大问题:启动时间。
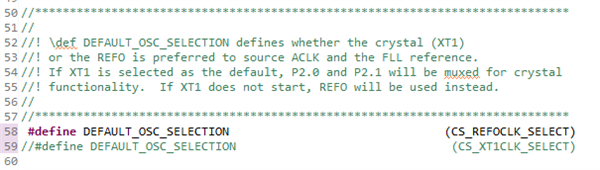
WDTCTL = WDTPW + WDTCNTCL + WDTIS_4; BSP_configureMCU(); __bis_SR_register(GIE);
当函数 bsp_cofiguremcu()需要超过1秒(!)时,此代码不起作用 完成。
WDTCTL = WDTPW + WDTCNTCL + WDTIS_3; BSP_configureMCU(); __bis_SR_register(GIE);
由于 WDT 复位时间设置为16秒、因此工作正常。
我需要低于200ms 的启动时间、那么理论上这是可行的吗?
此致
Igor