请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430I2041 主题中讨论的其他器件:TIDM-3OUTSMTSTRP、 MSP-ISO、 UNIFLASH、 MSP430F67791、 MSP430G2553
你(们)好
我叫 Dung。
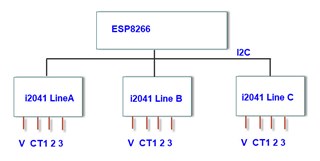
我有 MSP430i2041 EVM 1电压(990K-2.4K - 220VAC 最大250V)、3电流(CT 1000.1、R = 6.8R 最大80A)的项目、我的设计采用相同 的 TIDM-3OUTSMTSTRP 并使用 CT、不包括继电器。
我有一些问题。 创建项目时 EMDC 上的电流、为什么 TI 计算 器的电流值约为实际值。
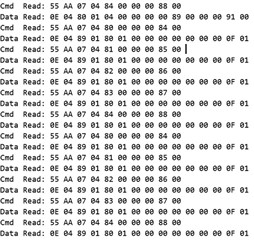
当我通过 EMDC 为 MSP430i2041使用套件 MSP430F5529LP 进行校准时、如果仅将3个 CT 连接到 EVM、则可以将结果读取到 EMDC、当 我将1V 3C 连接到 EVM 时、它无法连接到 EMDC。 我不知道为什么(我 不使用 MSP-ISO)。