This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
https://e2e.ti.com/support/microcontrollers/msp-low-power-microcontrollers-group/msp430/f/msp-low-power-microcontroller-forum/893818/msp430fr2433-adc-sampling-response
是否有人在更高的采样频率下使用了10位 ADC? 我想知道在较高的频率下、响应是否是线性的。
您好、Kunal、
ADC 采样值的线性度似乎与采样频率无关。
也许您可以在10位 ADC 模式下进行一些测试。
此致
Johnson
看来、一些 esp32的用户指出、它不会忠实地拾取高音频。 只是想知道原因、我将使用 MSP430进行大约80ksps 的音频采样
当 该模块以80kps 的速率运行并返回更新时、我将测试采样值的线性度。
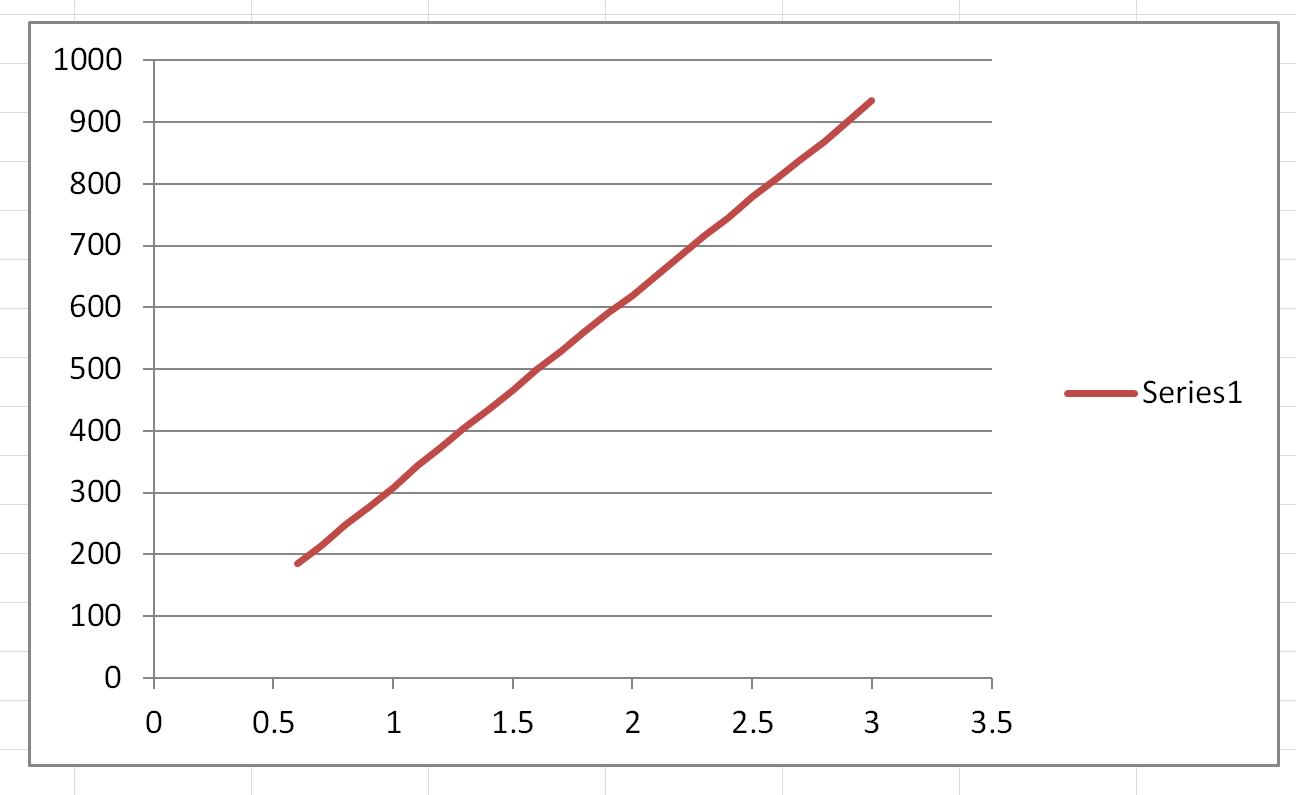
我做了一些测试,并将一些来自我身边的数据作为您的参考:
测试环境:
VREF:3.3V
ADC:10位
速度:80kps
测试日期显示 该值的线性度很好、我没有发现任何问题。
嗨、Johnson、您能分享您使用的确切代码吗?
有我的测试代码作为您的参考:
#include void Software_Trim (); //获取最佳 DCOFTRIM 值 #define MCLK_FREQ_MHz 的软件调整8. // MCLK = 8MHz unsigned int ADC_value = 0; int main (void) { WDTCTL = WDTPW | WDTHOLD; //停止 WDT //配置 GPIO P1DIR |= BIT0; //将 P1.0设置为输出方向 P1OUT &=~BIT0; //清除 P1.0 //配置 ADC A1引脚 SYSCFG2 |= ADCPCTL1; //配置 XT1振荡器 P2SEL0 |= BIT0 | BIT1; // P2.0~P2.1:晶振引脚 //禁用 GPIO 上电默认高阻抗模式以激活 //先前配置的端口设置 PM5CTL0 &=~LOCKLPM5; _bis_SR_register (SCG0); //禁用 FLL CSCTL3 |= SELREF_REFOCLK; //将 REFO 设置为 FLL 基准源 CSCTL1 = DCOFTRIMEN | DCOFTRIM0 | DCOFTRIM1 | DCORSEL_3;// DCOFTRIM = 3、DCO 范围= 8MHz CSCTL2 = FLLD_0 + 243; // DCODIV = 8MHz _DELAY_CYCLES (3); _BIC_SR_register (SCG0); //启用 FLL Software_Trim (); //软件调整以获得最佳 DCOFTRIM 值 CSCTL4 = SELMS_DCOCLKDIV | SELA_REFOCLK;//将默认 REFO (~32768Hz)设置为 ACLK 源、ACLK = 32768Hz //默认 DCODIV 为 MCLK 和 SMCLK 源 //配置 ADC ADCCTL0 |= ADCON | ADCMSC; // ADCON ADCCTL1 |= ADCSHS_2 | ADCCONSEQ_2; //重复单通道;TA1.1 TRIG 采样开始 ADCCTL2 |= ADCRES; // 10位转换结果 ADCMCTL0 |= ADCINCH_1 | ADCSREF_0; // A1 ADC 输入选择;Vref=1.5V ADCIE |= ADCIE0; //启用 ADC 转换完成中断 //配置引用 PMMCTL0_H = PMMPW_H; //解锁 PMM 寄存器 PMMCTL2 |= INTREFEN; //启用内部基准 _DELAY_CYCLES (400); //基准趋稳延迟 ADCCTL0 |= ADCENC; // ADC 使能 // ADC 转换触发信号- TimerA1.1 (80KHz 导通周期) TA1CCR0 = 100-1; // PWM 周期 TA1CCR1 = 50-1; // TA1.1 ADC 触发 TA1CCTL1 = OUTMOD_4; // TA1CCR0切换 TA1CTL = tassel__SMCLK | MC_1 | TACLR; // ACLK、向上计数模式 _bis_SR_register (LPM0_bits | GIE); //输入带中断的 LPM3 } // ADC 中断服务例程 #if defined (__TI_Compiler_version__)|| defined (__IAR_systems_ICC__) #pragma vector=ADC_vector __interrupt void ADC_ISR (void) #Elif defined (__GCOMPILE__) void __attribute__(((nC_vector)#interrupt !void (nc)#inc Compiler (void)错误! #endif { switch (__evo_in_range (ADCIV、ADCIV_ADCIFG)) { 案例 ADCIV_NONE: 中断; ADCIV_ADCOVIFG 案例: 中断; 案例 ADCIV_ADCTOVIFG: 中断; ADCIV_ADCHIIFG 案例: 中断; ADCIV_ADCLOIFG 案例: 中断; ADCIV_ADCINIFG 案例: 中断; ADCIV_ADCIFG 案例: ADC_Value = ADCMEM0; // 如果(ADCMEM0 < 0x155) // ADCMEM = A0 < 0.5V? // P1OUT &=~BIT0; //清除 P1.0 LED 关闭 // else // P1OUT |= BIT0; //将 P1.0 LED 设置为打开 ADCIFG = 0; 中断; //将 CPUOFF 位从0 (SR)清零 默认值: 中断; } } void Software_Trim () { unsigned int oldDcotTap = 0xFFFF; unsigned int newDcoTap = 0xFFFF; unsigned int newDcoDelta = 0xFFFF; unsigned int bestDcoDelta = 0xFFFF; unsigned int csCtl0Copy = 0; unsigned int csCtl1Copy = 0; 无符号 int csCtl0Read = 0; 无符号 int csCtl1Read = 0; unsigned int dcoFreqTrim = 3; unsigned char endLoop = 0; 操作 { CSCTL0 = 0x100; // DCO 抽头= 256 操作 { CSCTL7 &=~DCOFFG; //清除 DCO 故障标志 } while (CSCTL7 & DCOFFG); //测试 DCO 故障标志 __DELAY_CYCLLES ((unsigned int) 3000 * MCLK_FREQ_MHz);//等待 FLL 锁定状态(FLLUNLOCK)保持稳定 //建议等待24个经过分频的 FLL 参考时钟周期 while (((CSCTL7 &(FLLUNLOCK0 | FLLUNLOCK1))和&((CSCTL7 & DCOFFG)= 0)); CSCCtl0Read = CSCTL0; //读取 CSCTL0 CSCCtl1Read = CSCTL1; //读取 CSCTL1 oldDcoTap = newDcoTap; //记录上次的 DCOTAP 值 NewDcoTap = csCtl0Read & 0x01ff; //获取此次的 DCOTAP 值 dcoFreqTrim =(csCtl1Read & 0x0070)>>4;//获取 DCOFTRIM 值 if (newDcoTap < 256) // DCOTAP < 256 { newDcoDelta = 256 - newDcoTap; // DCPTAP 和256之间的增量值 if ((oldDcotap!= 0xFFFF)&&(oldDcotap >= 256)// DCOTAP 交叉256 endLoop = 1; //停止 while 循环 其他 { dcoFreqTrim --; CSCTL1 =(csCtl1Read &(~(DCOFTRIM0+DCOFTRIM1+DCOFTRIM2)))|(dcoFreqTrim <4); } } 其他 // DCOTAP >= 256 { newDcoDelta = newDcoTap - 256; // DCPTAP 和256之间的增量值 if (oldDcoTap < 256) // DCOTAP 交叉256 endLoop = 1; //停止 while 循环 其他 { dcoFreqTrim++; CSCTL1 =(csCtl1Read &(~(DCOFTRIM0+DCOFTRIM1+DCOFTRIM2)))|(dcoFreqTrim <4); } } if (newDcoDelta < bestDcoDelta) //记录最接近256的 DCOTAP { csCtl0Copy = csCtl0Read; csCtl1Copy = csCtl1Read; bestDcoDelta = newDcoDelta; } }while (endLoop =0); //轮询直至 endLoop = 1 CSCTL0 = csCtl0Copy; //重新加载锁定的 DCOTAP CSCTL1 = csCtl1Copy; //重新加载锁定的 DCOFTRIM while (CSCTL7 &(FLLUNLOCK0 | FLLUNLOCK1));//轮询直到 FLL 被锁定 }