请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP432P401R
我正在上传我希望与 ADS1292通信的 MSP432代码(原型中心电路板用于此目的)、原理图为 e2e.ti.com/.../pc_5F00_ads1292r_5F00_brk_5F00_v3.pdf
我已尽力编写代码、在 TI 提供的 MSP432 SDK 的帮助下、我尝试逐个启用 SPI、UART、很高兴它帮助我快速编写代码
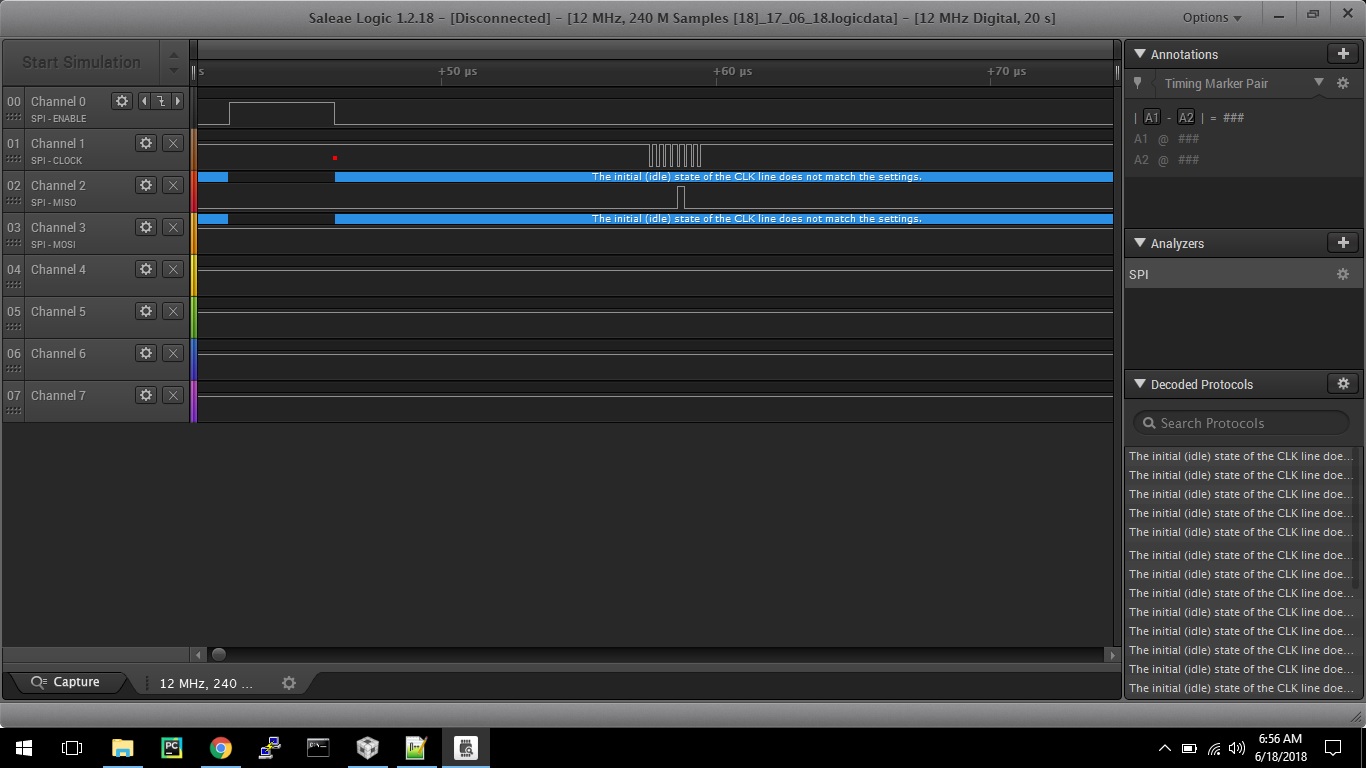
但是、我发现通过 MSP432通过 SPI 访问 AD1292的寄存器时遇到了问题、每次我在调试模式下通过 SPI 读取电路板时、每一步都需要比所需的更多的延迟
这是我以 e2e.ti.com/.../6175.project.zip 的形式提供的完整代码包、
如果在编译过程中找不到任何文件(由于包含路径),则会打开 build>变量并将 MSP lib 路径更改为 MSP lib 头文件所在的位置,否则必须下载这些文件(如果没有)
让我来展示一下代码流
UART 和 SPI 所连接的重要解串/引脚
*与 SPI 从器件数据回显代码示例配合使用。 * * MSP432P401 * -------- * | | * | | * | | * | P1.6|->数据输出(UCB0SIMO) * | | * | P1.7|<-数据输入(UCB0SOMI) * | | * | P1.5|->串行时钟输出(UCB0CLK) *作者:Timothy Logan / #define ADS1292_DRDY_PORT GPIO_PORT_P2 #define ADS1292_DRDY_PIN GPIO_PIN3 //J4.34 #define ADS1292_CS_PORT GPIO_PORT_P5 #define ADS1292_CS_PIN GPIO_PIN1 //J4.33 #define ADS1292_START_PORT GPIO_PORT_P3 #define ADS1292_START_PIN GPIO_PIN5 //J4.32 #define ADS1292_PWDN_PORT GPIO_PORT_P3 #define ADS1292_PWDN_PIN GPIO_PIN7 //J4.31 /* SPI MasterConfig = USCI_USCI_USCI 配置参数* USCI_Spi_USCI 配置 EUSCI_B_SPI_CLOCKSOURCE_SMCLK、 // SMCLK 时钟源 //3000000、 // SMCLK = DCO = 3MHz 1000000、 // SMCLK = DCO = 1MHz 50万、 // SPICLK = 500kHz EUSCI_B_SPI_MSB_FIRST、 // MSB 优先 EUSCI_B_SPI_PHASE_DATA_Changed_ONFIRST_Captured_On_Next、//相位 EUSCI_B_SPI_CLOCKPOLARITY_INACTION_HIGH、//高极性 EUSCI_B_SPI_3引脚 // 3线 SPI 模式 }; /* UART 配置参数。 这些是配置参数 、*使 eUSCI 成为 UART 模块以115200波特率运行。 这些 *值是使用 TI 提供的在线计算器计算的* 网址 为:* software-dl.ti.com/.../index.html * / const eUSCI_UART_Config uartConfig = { EUSCI_A_UART_CLOCKSOURCE_SMCLK、 // SMCLK 时钟源 13、 // BRDIV = 13 0、 // UCxBRF = 0 37、 // UCxBRS = 37 EUSCI_A_UART_NO_奇 偶校验、 //无奇偶校验 EUSCI_A_UART_MSB_FIRST、 // MSB 优先 EUSCI_A_UART_One_stop_bit、 //一个停止位 EUSCI_A_UART_MODE、 // UART 模式 EUSCI_A_UART_oversampling_BAUDRATE_generation //过采样 };
请注意、这些只是代码段、在上传项目的情况下、完整代码才会出现
初始化部分
int Setup_Initialization()
{
/*停止 WDT */
WDT_A_HOLDTimer();
/*初始化数据就绪和芯片选择引脚*/
GPIO_setAsInputPin (ADS1292_DRDY_PORT、ADS1292_DRDY_PIN);
GPIO_setAsOutputPin (ADS1292_CS_PORT、ADS1292_CS_PIN);
GPIO_setAsOutputPin (ADS1292_start_port、ADS1292_start_PIN);
GPIO_setAsOutputPin (ADS1292_PWDN_PORT、ADS1292_PWDN_PIN);
/*在 SPI 模式下选择 P1.5 P1.6和 P1.7 */
GPIO_setPeripheralModuleFunctionInputPin (GPIO_PORT_P1、
GPIO_PIN5 | GPIO_PIN6 | GPIO_PIN7、GPIO_PRIMARY_MODULE_FUNCTION);
/*在3线主控模式下配置 SPI */
SPI_initMaster (EUSCI_B0_BASE、&spiMasterConfig);
/*启用 SPI 模块*/
SPI_enableModule (USCI_B0_BASE);
/*启用中断*/
SPI_enableInterrupt (EUSCI_B0_BASE、EUSCI_B_SPI_Receive_interrupt);
INTERRUPT_enableInterrupt (INT_EUSCIB0);
interrupt_enableSlepOnIsrExit();
/*在 UART 模式下选择 P1.2和 P1.3并将 P1.0作为输出(LED)*/
GPIO_setPeripheralModuleFunctionInputPin (GPIO_PORT_P1、
GPIO_PIN2 | GPIO_PIN3、GPIO_PRIMARY_MODULE_FUNCTION);
GPIO_setAsOutputPin (GPIO_PORT_P1、GPIO_PIN0);
GPIO_setOutputLowOnPin (GPIO_PORT_P1、GPIO_PIN0);
/*将 DCO 设置为24MHz (升级 Vcore)*/
FlashCtl_setWaitState (FLASH_BANK0、2);
FlashCtl_setWaitState (FLASH_BANK1、2);
PCM_setCoreVoltageLevel (PCM_VCORE1);
CS_setDCOCenteredFrequency (CS_DCO_FREQUENCY 24);
/*配置 UART 模块*/
UART_initModule (EUSCI_A0_BASE、uartConfig);
/*启用 UART 模块*/
UART_enableModule (USCI_A0_BASE);
/*启用中断*/
UART_enableInterrupt (EUSCI_A0_BASE、EUSCI_A_UART_Receive_interrupt);
INTERRUPT_enableInterrupt (INT_EUSCIA0);
interrupt_enableSlepOnIsrExit();
/*ADS 1292初始化*/
/*ADS1292复位*/
GPIO_setOutputHighOnPin (ADS1292_PWDN_PORT、ADS1292_PWDN_PIN);
延迟(100); //等待100毫秒
GPIO_setOutputLowOnPin (ADS1292_PWDN_PORT、ADS1292_PWDN_PIN);
延迟(100);
GPIO_setOutputHighOnPin (ADS1292_PWDN_PORT、ADS1292_PWDN_PIN);
延迟(100);
/*禁用启动*/
GPIO_setOutputLowOnPin (ADS1292_START_PORT、ADS1292_START_PIN);
延迟(20);
/*启用启动*/
GPIO_setOutputHighOnPin (ADS1292_START_PORT、ADS1292_START_PIN);
延迟(20);
/*硬停*/
GPIO_setOutputLowOnPin (ADS1292_START_PORT、ADS1292_START_PIN);
延迟(100);
/*发送命令数据开始*/
ads1292_SPI_Command_Data (开始);
/*软停止*/
ads1292_SPI_Command_Data (停止);
延迟(50);
/*停止连续读取数据*/
ads1292_SPI_Command_Data (SDATAC);
延迟(300);
ADs1292_Reg_Write (ADS1292_REG_CONFIG1、0x00); //将采样率设置为125SPS
延迟(10);
ADs1292_Reg_Write (ADS1292_REG_CONFIG2、0b10100000);//导联脱落补偿关闭、测试信号禁用
延迟(10);
ADs1292_ReG_Write (ADS1292_REG_LOFF、0b00010000); //lead-off 默认值
延迟(10);
ADs1292_Reg_Write (ADS1292_REG_CH1SET、0b01000000);//通道1启用、增益6、连接到中的电极
延迟(10);
ADs1292_ReG_Write (ADS1292_REG_CH2SET、0b01100000);//通道2启用、增益6、连接到中的电极
延迟(10);
ADs1292_Reg_Write (ADS1292_REG_RLDSENS、0b00101100);//RLD 设置:FMOD/16、RLD 启用、仅来自 Ch2的 RLD 输入
延迟(10);
ADs1292_Reg_Write (ADS1292_REG_LOFFSENS、0x00); //LOFF 设置:全部禁用
延迟(10);
//Skip 寄存器8、LOFF Settings 默认值
ads1292_Reg_Write (ADS1292_REG_RESP1、0b11110010); //呼吸:仅限 MOD/DEMOD,0相
延迟(10);
ads1292_Reg_Write (ADS1292_REG_RESP2、0b00000011); //Respiration:Calib Off、呼吸频率默认值
延迟(10);
/*停止连续读取数据*/
ads1292_SPI_Command_Data (RDATAC);
延迟(10);
/*启用启动*/
GPIO_setOutputHighOnPin (ADS1292_START_PORT、ADS1292_START_PIN);
延迟(20);
返回0;
}
与 ADS1292通信
void ads1292_SPI_Command_Data (uint8_t 命令) { TXData =命令; GPIO_setOutputLowOnPin (ADS1292_CS_PORT、ADS1292_CS_PIN); 延迟(2); GPIO_setOutputHighOnPin (ADS1292_CS_PORT、 ADS1292_CS_PIN); 延迟(2); GPIO_setOutputLowOnPin (ADS1292_CS_PORT、ADS1292_CS_PIN); 延迟(2); //轮询以查看 TX 缓冲区是否就绪*/ while (!(SPI_getInterruptStatus (EUSCI_B0_BASE、EUSCI_B_SPI_Transmit_INTERRUPT))); //将数据发送到从设备*/ SPI_transmitData (EUSCI_B0_BASE、TXData); GPIO_setOutputHighOnPin (ADS1292_CS_PORT、ADS1292_CS_PIN); delay }(2);) void ads1292_Reg_Write (uint8_t read_write_address、uint8_t data) { uint8_t dataToSend; switch (read_write_address) { 案例1: 数据= DATA &(uint8_t) 0x87; 中断; 案例2: 数据= DATA &(uint8_t) 0xFB; 数据|= 0x80; 中断; 案例3: data = data &(uint8_t) 0xFD; 数据|= 0x10; 中断; 案例7: 数据= DATA &(uint8_t) 0x3F; 中断; 案例8: 数据= DATA &(uint8_t) 0x5F; 中断; 案例9: 数据|= 0x02; 中断; 案例10: 数据=数据& 0x87; 数据|= 0x01; 中断; 案例11: 数据=数据和0x0F; 中断; 默认值: break; } //现在将寄存器地址和命令组合成一个字节: dataToSend = Read_write_address | WREG; GPIO_setOutputLowOnPin (ADS1292_CS_port、ADS1292_CS_PIN); 延迟(2); GPIO_setOutInputOnPin (ADS1292_CS_PORT、 ADS1292_CS_PIN); 延迟(2); GPIO_setOutputLowOnPin (ADS1292_CS_PORT、ADS1292_CS_PIN); 延迟(2); //轮 询以查看 TX 缓冲区是否就绪* (!(SPI_getInterruptStatus (EUSCI_B0_S));// 发送 SPI_BIST_0 (*);*发送 SPI_BIT_RUSCI_0);*中断*(*发送 SPI_BIT_RUSCI_B);*发送 SPI_BUSCI_RUSCI_0);*中断/*(*发送 SPI_BUSCI_RUSCI_RUST_RUSCI_B) //将数据发送到从设备*/ SPI_transmitData (EUSCI_B0_BASE、0x00); /*要写入的寄存器数*/ /*轮询以查看 TX 缓冲器是否就绪*/ while (!(SPI_getInterruptStatus (EUSCI_B0_BASE、EUSCI_B_SPI_Transmit_INTERRUPT)))); // while (* ADS1292_OutputData (SPI_get_2_ADS1292_S );* USCI_S 输出到 ADS12_S 引脚12_S (USCI_S) 延迟(2); }
最重要和有问题 的代码就是这样
void delay (const int msec) { volatile int i; for (i=0;i通过 UART 发送接收到的数据的主循环
int main (void) { int i、j; Setup_Initialization(); while (1) { IF (ads1292dataReceived == true) { J=0; for (i=0;i<6;i+=3) //数据输出为(24个状态位+ 24位呼吸数据+ 24位 ECG 数据) { uecgtemp =(unsigned long)(((unsigned long) SPI_RX_buff [i+3]<< 16)|(unsigned long) SPI_RX_buff [i+4]<< 8)|(unsigned long) SPI_RX_buff [i+5]); uecgtemp =(unsigned long)(uecgtemp << 8); secgtemp =(带符号长整型)(uecgtemp); secgtemp =(带符号长整型)(secgtemp >> 8); s32DaqVals[j++]=secgtemp; } DataPacketHeader[0]= CES_CMDIF_PKT_START_1;//数据包头1:0x0A DataPacketHeader[1]= CES_CMDIF_PKT_START_2;//数据包头2:0xFA DataPacketHeader[2]=(uint8_t)(data_len); //数据长度 DataPacketHeader[3]=(uint8_t)(data_len>8); DataPacketHeader[4]= CES_CMDIF_TYPE_DATA; //数据包类型:0x02 -数据0x01 -命令 DataPacketHeader[5]= s32DaqVals[1]; // 4字节 ECG 数据 DataPacketHeader[6]= s32DaqVals[1]>8; DataPacketHeader[7]= s32DaqVals[1]>16; DataPacketHeader[8]=s32DaqVals[1]>24; DataPacketHeader[9]= s32DaqVals[0]; // 4字节呼吸数据 DataPacketHeader[10]= s32DaqVals[0]>8; DataPacketHeader[11]= s32DaqVals[0]>16; DataPacketHeader[12]=s32DaqVals[0]>24; DataPacketHeader[13]= CES_CMDIF_TYPE_DATA;//数据包 footer1:0x00 DataPacketHeader[14]= CES_CMDIF_PKT_STOP;//数据包 footer2:0x0B for (i=0;i<15;i++){ UART_transmitData (EUSCI_A0_BASE、DataPacketHeader[i]); //通过 USB 发送数据 } ads1292dataReceived = false; SPI_RX_缓冲 器计数= 0; } } // PCM_gotoLPM0 (); //__no_operation(); }SPI 中断处理程序
// // ////这是 EUSCI_B0中断矢量服务例程。 //// ********* void EUSCIB0_IRQHandler (void) { uint32_t status = SPI_getEnabledInterruptStatus (EUSCI_B0_BASE); volatile uint32_t jj; SPI_clearInterruptFlag (EUSCI_B0_BASE、STATUS); IF (STATUS 和 EUSCI_B_SPI_Receive_interrupt) { RXData = SPI_receiveData (EUSCI_B0_BASE); SPI_RX_buff [SPI_RX_buff Count ++]= RXData;//将结果数据存储在数组中 IF (SPI_RX_缓冲 器计数> 8){ SPI_RX_缓冲 器计数= 0; ads1292dataReceived = true; } /*从机处理信息的传输之间的延迟*/ for (jjj=0;jjj<50;jjj++); } }