

Other Parts Discussed in Thread: MSP430G2131, MSP430FR2111
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430FR2111 主题中讨论的其他器件:MSP430G2131、
工具/软件:Code Composer Studio
大家好!
您好!
我正在使用电机驱动器评估模块(DRV8837EVM)、在该模块中、我已将现有 MCU (G2131)替换为 FR2111。 其理念是使所有功能与 G2131和 FR2111的运行方式相同。
硬件已设置、我已确定 PWM 的来源、并相应地调整了占空比、直流电机按预期运行。 其理念是使该器件能够将电机的方向从顺时针切换到逆时针、反之亦然。 目前、我可以通过将 PWM 信号连接到测试点 IN1来实现这一点、使其逆时针旋转、并将其连接到 IN2来顺时针旋转。
目标是将其连接到 GPIO、以便我能够切换此操作。 我的代码在实现这一点方面是否最佳? 我当前改变电机方向的方法能否得到改进?
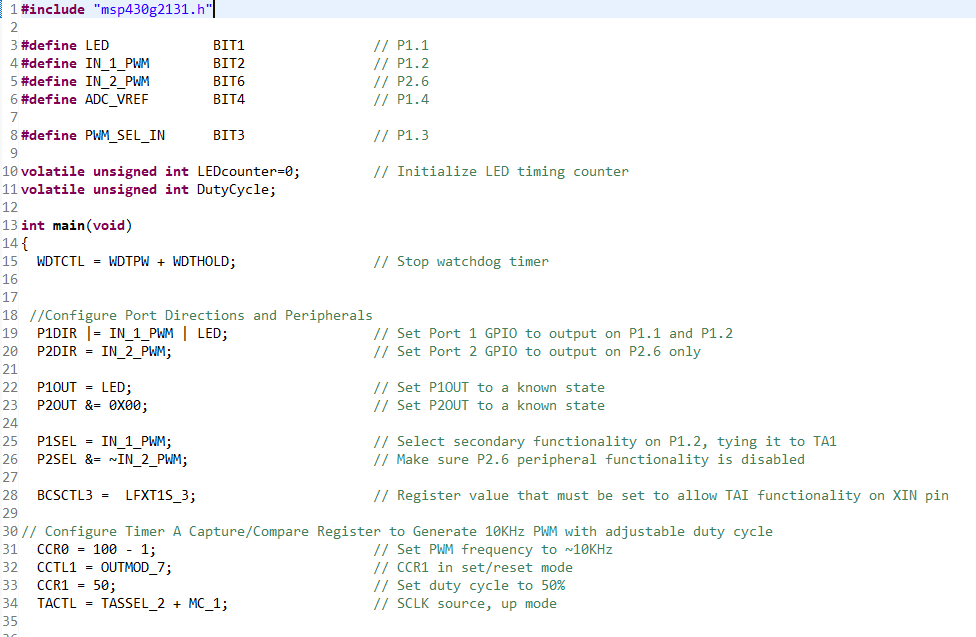
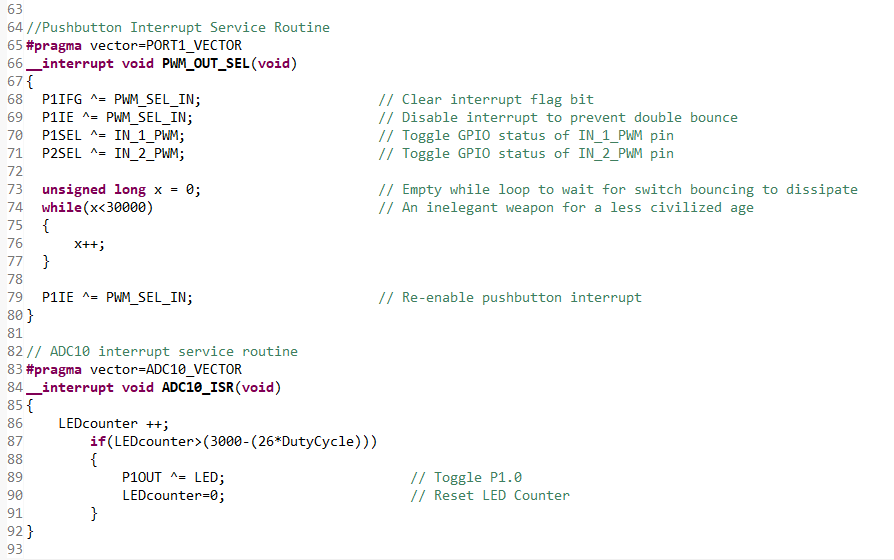
以下是 MSP430G2131上当前与此操作相关的代码:
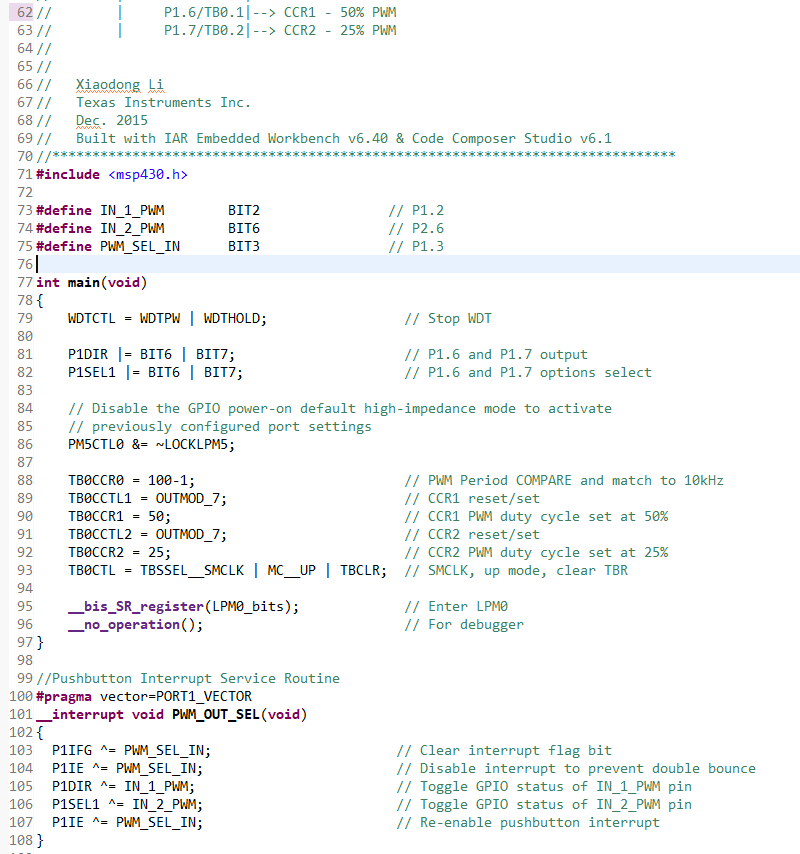
下面您将看到 MSP430FR2111上当前的代码:
我们非常感谢您的任何帮助。 谢谢!
