请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MSP430FR6047 您好!
我尝试使用 MSP30FR6047EVM 修订版2和 DN25管道构建水表传感器、其中传感器的距离约为80毫米、我有一些问题。
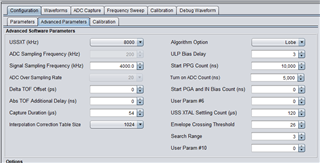
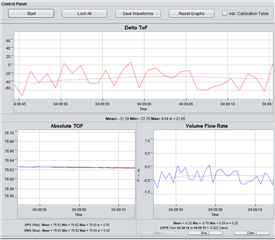
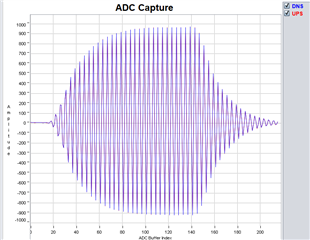
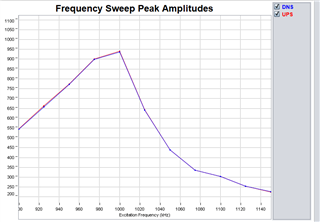
1.以下设置和 ADC 采集是否正常? 我是否需要进行任何更改?
2.完成 EVM 配置后、我会将配置设置传递到 具有相同管道和收发器距离的定制 MSP30FR6047板上。 除了仪表常数和仪表校准参数外、还有其他事项需要更改吗?