


请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TDA3MD 工具/软件:WEBENCH 设计工具
设计工具
各位专家、您好!
最近、我在 TDA3 (processor_sdk_vision_03_07_00_00),上做了一些研究、我 已经在 VISION_SDK 中阅读了您的文档。
但 仍对框架设计 或 用例 设计有一些了解、如下所示。 有人可以帮助吗? 非常感谢!
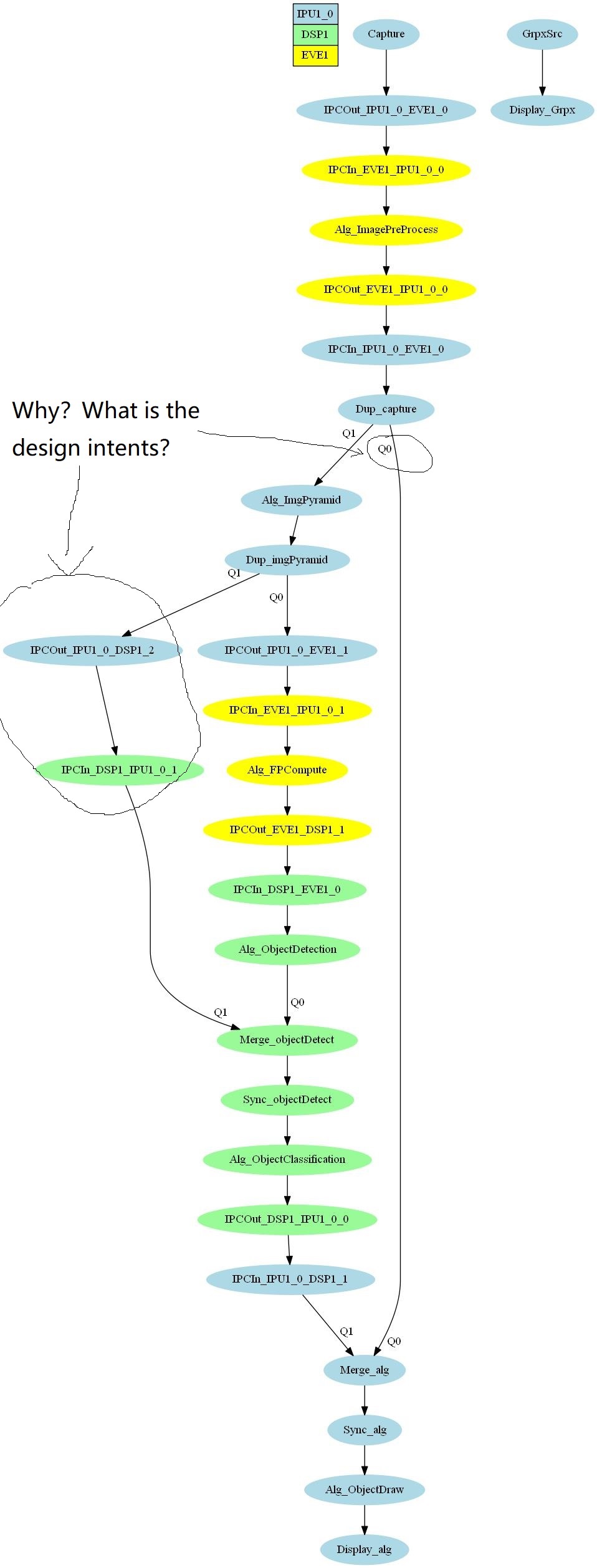
- 作为用例(vIP_single_cam_analytics2) 演示显示,Algramid 将 信息复制 到 DSP1 链接和 EVE1 链接,但 DSP1 链接 未处理 任何内容 并 合并 到 ObjectDetect 链接。 那么,设计意图?或只保持一条链路的 效果是相同的?
- 在我的,中 、需要 EVE 和 DSP、EVE 和 DSP 需要保持与 少量 数据的通信 以进行交换。 在 视觉 架构中使用共享 DDR 存储器指针是否是最佳方式?
- 关于 DUP /同步/合并···链接,您是否可以 向我展示更多 使用规则或需要 注意。

{kind=link}