主题中讨论的其他器件:AM4372、 TPS65218、 WL1835
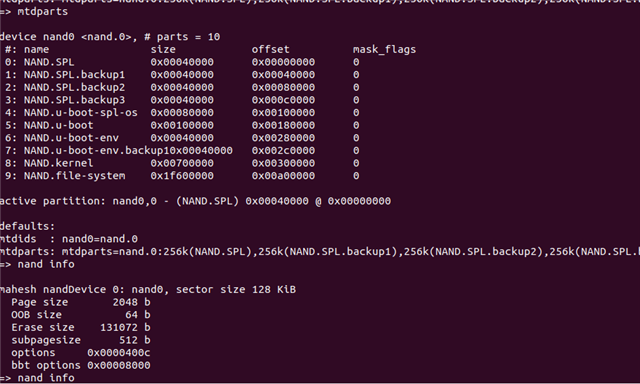
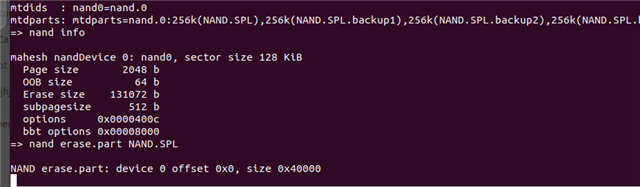
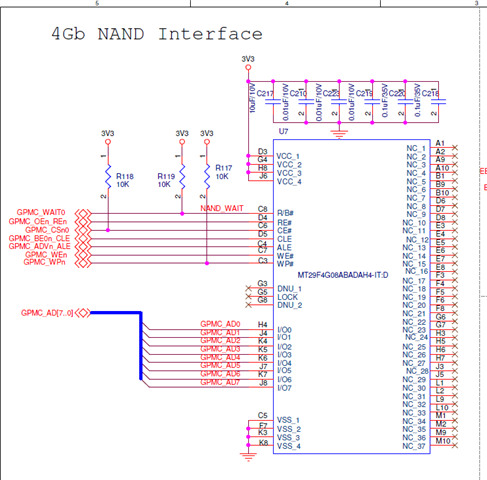
我修改了 AM437X-ETH。 在 Uboot 内为 NAND 闪存配置了 pinmux DTS 文件 ,但无法擦除,读取,写入。 我们正在使用 MT29F4G08ABADAH4-IT:D 。
/*
*版权所有(C) 2013德州仪器公司- http://www.ti.com/
*
*本程序是自由软件;您可以重新分发和/或修改它
*根据 GNU 通用公共许可证第2版 AS 的条款
*由自由软件基金会发行。
*/
/* AM437x GP EVM */
/dts-v1/;
#include "am4372.dtsi"
#include "am4372-u-boot.dtsi"
#include
#include
#include
/{
模型="TI AM437x ETH";
兼容="ti、AM437x-gp-evm"、"ti、am4372"、"ti、am43";
OCP{
u-boot、dm-spl;
};
别名{
display0 =&lcd0;
serial3 =&uart3;
};
选择了{
stdout-path =&uart0;
节拍定时器=&timer2;
};
vmmcsd_fixed:fixedregulator-sd{
兼容="固定稳压器";
稳压器名称="vmmcsd_fixed";
稳压器最小微伏=<3300000>;
稳压器最大微伏=<3300000>;
高电平有效使能;
状态="可以";
};
VTT_FIXED:FixedRegulator-VTT{
兼容="固定稳压器";
稳压器名称="VTT_FIXED";
稳压器最小微伏=<1500000>;
稳压器最大微伏=<1500000>;
稳压器始终开启;
稳压器引导开启;
高电平有效使能;
GPIO =<&GPIO5 7 GPIO_ACTIVE_HIGH>;
状态="已禁用";
};
vmmcwl_fixed:fixedregulator-mmcwl{
兼容="固定稳压器";
稳压器名称="vmmcwl_fixed";
稳压器最小微伏=<1800000>;
稳压器最大微伏电压=<1800000>;
GPIO =<&GPIO1 20 GPIO_ACTIVE_HIGH>;
高电平有效使能;
状态="已禁用";
};
背光{
兼容="PWM 背光";
PWM =<&ecap0 0 50000 PWM_POLARY_INVERRIDE>;
亮度级别=<0 51 53 56 62 75 101 152 255>;
default-brightness 级别=<8>;
状态="已禁用";//PG
};
Matrix 键盘:Matrix 键盘@0{
兼容="GPIO-MATRY-KEYPAD ";
去抖-延迟-ms =<5>;
COL-SCAN-DELAY-us =<2>;
状态="已禁用";//PG
ROW-GPIO =<&GPIO3 21 GPIO_ACTIVE_HIGH /*组3、引脚21 */
&GPIO4 3 GPIO_ACTIVE_HIGH /*组4、引脚3 */
&GPIO4 2 GPIO_ACTIVE_HIGH>;/* Bank4、PIN2 */
COL-GPIO =<&GPIO3 19 GPIO_ACTIVE_HIGH /*组3,引脚19 */
&GPIO3 20 GPIO_ACTIVE_HIGH>;/*组3、引脚20 */
Linux、keymap =<0x00000201 /* P1 */
0x00010202 /* P2 */
0x01000067 /*向上*/
0x0101006a /*右*/
0x02000069 /*左*/
0x0201006c>;/*向下*/
};
lcd0:显示{
兼容="osdlisks、osd057T0559-34ts"、"panel-dpi";
标签="LCD";
pinctrl-names ="默认";
PINCCTRL-0 =<&LCD_PINS>;
状态="已禁用";//PG
/*
* SelLCDorHDMI、低电平可选择 HDMI。 但事实并非如此
*面板启用 GPIO ,但我们没有 HDMI 驱动程序支持也没有
*支持在两个显示器之间切换,所以使用这个 GPIO 作为
面板的启用应该是安全的。
*/
ENABLE-GPIO =<&GPIO5 8 GPIO_ACTIVE_HIGH>;
面板定时{
时钟频率=<33000000>;
Hactive =<800>;
vactive =<480>;
前沿=<210>;
后沿=<16>;
HSYNC-LEN =<30>;
vback-scale =<10>;
v前沿=<22>;
vsync-len =<13>;
HSYNC-ACTIVE =<0>;
VSYNC-ACTIVE =<0>;
无效=<1>;
像素时钟主动=<1>;
};
端口{
LCD_IN:端点{
远程端点=<&dpi_out>;
};
};
};
/*固定12MHz 振荡器*/
REFCLK:振荡器{
#clock-cells =<0>;
兼容="固定时钟";
时钟频率=<12000000>
};
};
uart0{
pinctrl-names ="默认";
PINCCTRL-0 =<&uart0_PINS>;
状态="可以";
};
&am43xx_pinmux{
pinctrl-names ="默认"、"睡眠";
pinctrl-0 =<&wlan_pins_default>;
PINCCTRL-1 =<&WLAN_PINS_SLEEP>;
i2c0_pins:i2c0_pins{
PINCCTRL-SINGLE、PINS =<
0x188 (PIN_INPUT_PULLUP | SLEWCTRL_FAST | MUX_MODE0)/* i2c0_sda.i2c0_sda */
0x18c (PIN_INPUT_PULLUP | SLEWCTRL_FAST | MUX_MODE0)/* i2c0_SCL.i2c0_SCL */
>;
};
i2c1_pins:i2c1_pins{
PINCCTRL-SINGLE、PINS =<
// 0x15c (PIN_INPUT_PULLUP | SLEWCTRL_FAST | MUX_MODE2)
// 0x158 (PIN_INPUT_PULLUP | SLEWCTRL_FAST | MUX_MODE2)
>;
};
mmc1_pins:pinmux_mmc1_pins{
PINCCTRL-SINGLE、PINS =<
//0x160 (PIN_INPUT | MUX_MODE7)/* spi0_CS1.GPIO0_6 */
0x234 (PIN_INPUT_PULLUP | MUX_MODE7)
>;
};
ecap0_pins:backlight_pins{
PINCCTRL-SINGLE、PINS =<
// 0x164 MUX_MODE0 /* eCAP0_IN_PWM0_OUT.eCAP0_IN_PWM0_OUT MODE0 */
>;
};
uart0_pins:pinmux_uart0_pins{
PINCCTRL-SINGLE、PINS =<
0x170 (PIN_INPUT | MUX_MODE0)/* uart0_RxD.uart0_RxD */
0x174 (PIN_OUTPUT | MUX_MODE0)/* uart0_TXD.uart0_TXD */
>;
};
pixcir_ts_pins:pixcir_ts_pins{
PINCCTRL-SINGLE、PINS =<
// 0x264 (PIN_INPUT_PULLUP | MUX_MODE7)/* SPI2_d0.GPIO3_22 */
>;
};
cpsw_default:cpsw_default{
PINCCTRL-SINGLE、PINS =<
/*从器件1 */
// 0x114 (PIN_OUTPUT_PULLDDOWN | MUX_MODE2)/* mii1_txen.rgmii1_txen */
// 0x118 (PIN_INPUT_PULLDDOWN | MUX_MODE2)/* mii1_rxdv.rgmii1_rxctl */
// 0x11c (PIN_OUTPUT_PULLDDOWN | MUX_MODE2)/* mii1_txd1.rgmii1_txd3 */
// 0x120 (PIN_OUTPUT_PULLDDOWN | MUX_MODE2)/* mii1_txd0.rgmii1_txd2 */
// 0x124 (PIN_OUTPUT_PULLDDOWN | MUX_MODE2)/* mii1_txd1.rgmii1_txd1 */
// 0x128 (PIN_OUTPUT_PULLDDOWN | MUX_MODE2)/* mii1_txd0.rgmii1_txd0 */
// 0x12c (PIN_OUTPUT_PULLDDOWN | MUX_MODE2)/* mii1_txclk.rmii1_tclk */
// 0x130 (PIN_INPUT_PULLDOWN | MUX_MODE2)/* mii1_rxclk.rmii1_RCLK */
// 0x134 (PIN_INPUT_PULLDDOWN | MUX_MODE2)/* mii1_rxd1.rgmii1_rxd3 */
// 0x138 (PIN_INPUT_PULLDDOWN | MUX_MODE2)/* mii1_rxd0.rgmii1_rxd2 */
// 0x13c (PIN_INPUT_PULLDOWN | MUX_MODE2)/* mii1_rxd1.rgmii1_rxd1 */
// 0x140 (PIN_INPUT_PULLDOWN | MUX_MODE2)/* mii1_rxd0.rgmii1_rxd0 */
>;
};
cpsw_sleep:cpsw_sleep{
PINCCTRL-SINGLE、PINS =<
/*从器件1复位值*/
// 0x114 (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x118 (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x11c (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x120 (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x124 (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x128 (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x12c (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x130 (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x134 (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x138 (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x13c (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x140 (PIN_INPUT_PULLUP | MUX_MODE7)
>;
};
davinci_mdio_default:davinci_mdio_default{
PINCCTRL-SINGLE、PINS =<
/* MDIO */
// 0x148 (PIN_INPUT_PULLUP | SLEWCTRL_FAST | MUX_MODE0)/* MDIO_DATA.mDIO_DATA */
// 0x14c (PIN_OUTPUT_PULLUP | MUX_MODE0)/* MDIO_clk.mdio_clk */
>;
};
Davinci_MDIO_sleep:davinci_MDIO_sleep{
PINCCTRL-SINGLE、PINS =<
/* MDIO 复位值*/
//0x148 (PIN_INPUT_PULLUP | MUX_MODE7)
//0x14c (PIN_INPUT_PULLUP | MUX_MODE7)
>;
};
NAN_FLASH_x8:NAN_FLASH_x8{
PINCCTRL-SINGLE、PINS =<
0x26c (PIN_OUTPUT_PULLDDOWN | MUX_MODE7)/* SPI2_cs0.GPIO/eMMCorNANDSel */
0x0 (PIN_INPUT | MUX_MODE0)/* GPMC_ad0.GPMC_ad0 */
0x4 (PIN_INPUT | MUX_MODE0)/* GPMC_ad1.GPMC_ad1 */
0x8 (PIN_INPUT | MUX_MODE0)/* GPMC_ad2.GPMC_ad2 */
0xc (PIN_INPUT | MUX_MODE0)/* GPMC_ad3.GPMC_ad3 */
0x10 (PIN_INPUT | MUX_MODE0)/* GPMC_AD4.GPMC_AD4 */
0x14 (PIN_INPUT | MUX_MODE0)/* GPMC_ad5.GPMC_ad5 */
0x18 (PIN_INPUT | MUX_MODE0)/* GPMC_ad6.GPMC_ad6 */
0x1c (PIN_INPUT | MUX_MODE0)/* GPMC_AD7.GPMC_AD7 */
0x70 (PIN_INPUT_PULLUP | MUX_MODE0)/* GPMC_wait0.GPMC_wait0 */
0x74 (PIN_OUTPUT_PULLUP | MUX_MODE7)/* GPMC_WPN.GPMC_WPN */
0x7c (PIN_OUTPUT | MUX_MODE0)/* GPMC_csn0.GPMC_csn0 */
0x90 (PIN_OUTPUT | MUX_MODE0)/* gps_advn_ale.gps_advn_ale */
0x94 (PIN_OUTPUT | MUX_MODE0)/* gps_oen_ren.gps_oen_ren */
0x98 (PIN_OUTPUT | MUX_MODE0)/* gps_wen.gps_wen */
0x9C (PIN_OUTPUT | MUX_MODE0)/* GPMC_Be0n_cle.GPMC_Be0n_cle */
>;
};
DSS_PINS:DSS_PINS{
PINCCTRL-SINGLE、PINS =<
0x020 (PIN_OUTPUT_PULLUP | MUX_MODE1)/* GPMC AD 8 -> DSS 数据23 */
0x024 (PIN_OUTPUT_PULLUP | MUX_MODE1)
0x028 (PIN_OUTPUT_PULLUP | MUX_MODE1)
0x02c (PIN_OUTPUT_PULLUP | MUX_MODE1)
0x030 (PIN_OUTPUT_PULLUP | MUX_MODE1)
0x034 (PIN_OUTPUT_PULLUP | MUX_MODE1)
0x038 (PIN_OUTPUT_PULLUP | MUX_MODE1)
0x03c (PIN_OUTPUT_PULLUP | MUX_MODE1)/* GPMC AD 15 -> DSS 数据16 */
0x0a0 (PIN_OUTPUT_PULLUP | MUX_MODE0)/* DSS DATA 0 */
0x0a4 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0a8 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0ac (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0b0 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0b4 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0b8 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0bc (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0c0 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0c4 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0c8 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0cc (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0d0 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0d4 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0d8 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0dc (PIN_OUTPUT_PULLUP | MUX_MODE0)/* DSS 数据15 */
0x0e0 (PIN_OUTPUT_PULLUP | MUX_MODE0)/* DSS VSYNC */
0x0e4 (PIN_OUTPUT_PULLUP | MUX_MODE0)/* DSS HSYNC */
0x0e8 (PIN_OUTPUT_PULLUP | MUX_MODE0)/* DSS PCLK */
0x0ec (PIN_OUTPUT_PULLUP | MUX_MODE0)/* DSS AC BIAS EN */
>;
};
LCD_pins:LCD_pins{
PINCCTRL-SINGLE、PINS =<
/* GPIO 5_8以选择 LCD / HDMI */
//0x238 (PIN_OUTPUT_PULLUP | MUX_MODE7)
>;
};
dcan0_default:dcan0_default_pins{
PINCCTRL-SINGLE、PINS =<
//0x178 (PIN_OUTPUT | MUX_MODE2)/* uart1_CTSN.d_CAN0_TX */
//0x17c (PIN_INPUT_PULLUP | MUX_MODE2)/* uart1_rtsn.d_CAN0_Rx */
>;
};
dcan1_default:dcan1_default_pins{
PINCCTRL-SINGLE、PINS =<
//0x180 (PIN_OUTPUT | MUX_MODE2)/* uart1_RXD.d_CAN1_TX */
//0x184 (PIN_INPUT_PULLUP | MUX_MODE2)/* uart1_TXD.D_CAN1_Rx */
>;
};
vpfe0_PINS_DEFAULT:vpfe0_PINS_DEFAULT{
PINCCTRL-SINGLE、PINS =<
//0x1B0 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM0_HD 模式0*/
//0x1B4 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM0_VD 模式0*/
// 0x1C0 (PIN_INPUT_PULLUP | MUX_MODE0)/* cam0_pclk mode 0*/
// 0x1C4 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM0_DATA8 MODE 0*/
// 0x1C8 (PIN_INPUT_PULLUP | MUX_MODE0)/* cam0_data9 mode 0*/
// 0x208 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM0_DATA0模式0*/
// 0x20C (PIN_INPUT_PULLUP | MUX_MODE0)/* cam0_data1 mode 0*/
// 0x210 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM0_DATA2 MODE 0*/
// 0x214 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM0_DATA3模式0*/
// 0x218 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM0_DATA4模式0*/
// 0x21C (PIN_INPUT_PULLUP | MUX_MODE0)/* cam0_data5 mode 0*/
// 0x220 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM0_DATA6 MODE 0*/
// 0x224 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM0_DATA7模式0*/
>;
};
vpfe0_PINS_SLEEP:vpfe0_PINS_SLEEP{
PINCCTRL-SINGLE、PINS =<
// 0x1B0 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM0_HD MODE 0*/
// 0x1B4 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM0_VD mode 0*/
// 0x1C0 (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* cam0_pclk mode 0*/
// 0x1C4 (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* cam0_data8 mode 0*/
// 0x1C8 (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* cam0_data9 mode 0*/
// 0x208 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM0_DATA0 MODE 0*/
// 0x20C (DS0_pull_up_down_EN | input_EN | MUX_MODE7)/* cam0_data1 mode 0*/
// 0x210 (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* cam0_data2 mode 0*/
// 0x214 (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* cam0_data3 mode 0*/
// 0x218 (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* cam0_data4 mode 0*/
// 0x21C (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* cam0_data5 mode 0*/
// 0x220 (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* cam0_data6 mode 0*/
// 0x224 (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* cam0_data7 mode 0*/
>;
};
vpfe1_pins_default:vpfe1_pins_default{
PINCCTRL-SINGLE、PINS =<
// 0x1CC (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA9 MODE 0*/
// 0x1D0 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA8 MODE 0*/
// 0x1D4 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_HD MODE 0*/
// 0x1D8 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_VD MODE 0*/
// 0x1DC (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_pclk mode 0*/
// 0x1E8 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA0 MODE 0*/
// 0x1EC (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA1 MODE 0*/
// 0x1F0 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA2 MODE 0*/
// 0x1F4 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA3 MODE 0*/
// 0x1F8 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA4 MODE 0*/
// 0x1FC (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA5 MODE 0*/
// 0x200 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA6 MODE 0*/
// 0x204 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA7 MODE 0*/
>;
};
vpfe1_pins_sleep:vpfe1_pins_sleep{
PINCCTRL-SINGLE、PINS =<
// 0x1CC (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA9 MODE 0*/
// 0x1D0 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA8 MODE 0*/
// 0x1D4 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_HD MODE 0*/
// 0x1D8 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_VD mode 0*/
// 0x1DC (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* CAM1_pclk mode 0*/
// 0x1E8 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA0 MODE 0*/
// 0x1EC (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA1 MODE 0*/
// 0x1F0 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA2 MODE 0*/
// 0x1F4 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA3 MODE 0*/
// 0x1F8 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA4 MODE 0*/
// 0x1FC (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA5 MODE 0*/
// 0x200 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA6 MODE 0*/
// 0x204 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA7 MODE 0*/
>;
};
mmc3_PINS_DEFAULT:pinmux_mmc3_PINS_DEFAULT{
PINCCTRL-SINGLE、PINS =<
// 0x8c (PIN_INPUT_PULLUP | MUX_MODE3)/* gps_clk.mmc2_clk */
// 0x88 (PIN_INPUT_PULLUP | MUX_MODE3)/* gps_csn3.mmc2_cmd */
// 0x44 (PIN_INPUT_PULLUP | MUX_MODE3)/* GPMC_A1.mmc2_dat0 */
// 0x48 (PIN_INPUT_PULLUP | MUX_MODE3)/* GPMC_A2.mmc2_DAT1 */
// 0x4c (PIN_INPUT_PULLUP | MUX_MODE3)/* GPMC_A3.mmc2_dat2 */
// 0x78 (PIN_INPUT_PULLUP | MUX_MODE3)/* gps_be1n.mmc2_dat3 */
>;
};
mmc3_PINS_SLEEP:pinmux_mmc3_PINS_SLEEP{
PINCCTRL-SINGLE、PINS =<
// 0x8c (PIN_INPUT_PULLUP | MUX_MODE7)/* gps_clk.mmc2_clk */
// 0x88 (PIN_INPUT_PULLUP | MUX_MODE7)/* gps_csn3.mmc2_cmd */
// 0x44 (PIN_INPUT_PULLUP | MUX_MODE7)/* GPMC_A1.mmc2_dat0 */
// 0x48 (PIN_INPUT_PULLUP | MUX_MODE7)/* gps_A2.mmc2_dat1 */
// 0x4c (PIN_INPUT_PULLUP | MUX_MODE7)/* GPMC_A3.mmc2_dat2 */
0x78 (PIN_INPUT_PULLDOWN | MUX_MODE7)/* GPMC_Be1n.mmc2_dat3 */
>;
};
WLAN_PINS_DEFAULT:pinmux_WLAN_PINS_DEFAULT{
PINCCTRL-SINGLE、PINS =<
// 0x50 (PIN_OUTPUT_PULLUP | MUX_MODE7)/* GPMC_A4.GPIO1_20 WL_EN */
// 0x5c (PIN_INPUT | WAKEUP_ENABLE | MUX_MODE7)/* GPMC_A7.GPIO1_23 WL_IRQ*/
// 0x40 (PIN_OUTPUT_PULLUP | MUX_MODE7 )/* GPMC_a0.GPIO1_16 BT_EN*/
>;
};
WLAN_PINS_SLEEP:pinmux_WLAN_PINS_SLEEP{
PINCCTRL-SINGLE、PINS =<
// 0x50 (PIN_OUTPUT_PULLUP | MUX_MODE7)/* GPMC_A4.GPIO1_20 WL_EN */
// 0x5c (PIN_INPUT | WAKEUP_ENABLE | MUX_MODE7)/* GPMC_A7.GPIO1_23 WL_IRQ*/
// 0x40 (PIN_OUTPUT_PULLUP | MUX_MODE7)/* GPMC_a0.GPIO1_16 BT_EN*/
>;
};
uart3_pins:uart3_pins{
PINCCTRL-SINGLE、PINS =<
// 0x228 (PIN_INPUT | MUX_MODE0)/* uart3_RxD.uart3_RxD */
// 0x22c (PIN_OUTPUT_PULLDDOWN | MUX_MODE0)/* uart3_TXD.uart3_TXD */
// 0x230 (PIN_INPUT_PULLUP | MUX_MODE0)/* uart3_CTSN.uart3_CTSN */
// 0x234 (PIN_OUTPUT_PULLDDOWN | MUX_MODE0)/* uart3_rtsn.uart3_rtsn */
>;
};
};
i2c0{
状态="可以";
pinctrl-names ="默认";
pinctrl-0 =<&i2c0_pins>;
时钟频率=<100000>;
tps65218:tps65218@24 {
寄存器=<0x24>;
兼容="ti、tps65218";
中断= ;/* nMIN */
中断控制器;
#interrupt-cells =<2>;
dcdcdc1:稳压器-dcdcdc1{
兼容="ti、tps65218-dc1";
稳压器名称="VDD_CORE";
稳压器最小微伏=<912000>;
稳压器最大微伏=<1144000>;
稳压器引导开启;
稳压器始终开启;
};
dcdcdc2:稳压器-dcdcdc2{
兼容="ti、tps65218-dc2";
稳压器名称="VDD_MPU";
稳压器最小微伏=<912000>;
稳压器最大微伏值=<1378000>;
稳压器引导开启;
稳压器始终开启;
};
dcdc3:稳压器- dcdc3 {
兼容="ti、tps65218-dc3";
稳压器名称="vdcdc3";
稳压器最小微伏=<1500000>;
稳压器最大微伏=<1500000>;
稳压器引导开启;
稳压器始终开启;
};
dcdc5:稳压器- dcdc5{
兼容="ti、tps65218-dc5";
稳压器名称="v1_0bat";
稳压器最小微伏=<1000000>;
稳压器最大微伏=<1000000>;
};
dcdcdc6:稳压器-dcdcdc6{
兼容="ti、tps65218-dc6";
稳压器名称="v1_8bat";
稳压器最小微伏=<1800000>;
稳压器最大微伏电压=<1800000>;
};
ldo1:调节器-ldo1{
兼容="ti、tps65218-ldo1";
稳压器最小微伏=<1800000>;
稳压器最大微伏电压=<1800000>;
稳压器引导开启;
稳压器始终开启;
};
};
ov2659@30{
兼容="ovti、ov2659";
寄存器=<0x30>;
Clocks =<&REFCLK 0>;
时钟名称="xvclk";
端口{
ov2659_0:端点{
远程端点=<&vpfe1_EP>;
链路频率=/bits/64 <70000000>;
};
};
};
};
i2c1{
状态="已禁用";//确定
pinctrl-names ="默认";
pinctrl-0 =<&i2c1_pins>;
pixcir_ts@5c{
兼容="pixcir,pixcir_tangoc";
pinctrl-names ="默认";
pinctrl-0 =<&pixcir_ts_pins>;
reg =<0x5c>;
INTERRUPT-PARENT =<&GPIO3>;
中断=<22 0>;
ATB-GPIO =<&GPIO3 22 GPIO_ACTIVE_HIGH>;
触摸屏大小 x =<1024>;
触摸屏大小-y =<600>;
};
ov2659@30{
兼容="ovti、ov2659";
寄存器=<0x30>;
状态="已禁用";//PG
Clocks =<&REFCLK 0>;
时钟名称="xvclk";
端口{
ov2659_1:端点{
远程端点=<&vpfe0_EP>;
链路频率=/bits/64 <70000000>;
};
};
};
};
&epwmss0{
// status ="可以";//页
状态="已禁用";
};
tscadc (&T){
//status ="可以";
状态="已禁用";
ADC{
TI、ADC-CHANNELS =<0 1 2 3 4 5 6 7>;
};
};
ecap0{
//status ="可以";
状态="已禁用";
pinctrl-names ="默认";
pinctrl-0 =<&ecap0_pins>;
};
GPIO0{
状态="可以";
};
GPIO1{(&G)}
状态="可以";
};
&GPIO3{
状态="可以";
};
GPIO4{(&G)}
状态="可以";
};
GPIO5{
状态="可以";
ti、no-reset-on-init;
};
mmc1{
状态="可以";
VMMC-supply =<&vmmcsd_fixed>;//<&dcdc3>;
总线宽度=<4>;
pinctrl-names ="默认";
pinctrl-0 =<&mmc1_pins>;
//Broched-CD;
// CD-GPIO =<&GPIO0 6 GPIO_ACTIVE_LOW>;
CD-GPIO =<&GPIO5 1 GPIO_ACTIVE_LOW>;
};
&mmc3{
/*禁用 MMC3、因为 U-Boot 中不支持 SDIO */
状态="已禁用";
/*这些示例位于横梁上,在中进行了概述
xbar-event-map 元素*/
DMA =<& EDMA 30
&EDMA 31>;
dma-names ="tx"、"Rx";
VMMC-SUPPLY =<&vmmcwl_fixed>
总线宽度=<4>;
pinctrl-names ="默认"、"睡眠";
pinctrl-0 =<&mmc3_PINS_DEFAULT>;
pinctrl-1 =<&mmc3_PINS_SLEEP>;
CAP-Power-Off-Card;
保持电源在暂停状态;
TI、不可拆卸;
#address-Cells =<1>;
#size-cells =<0>;
wlcore:wlcore@0{
兼容="ti、wl1835";
寄存器=<2>;
INTERRUPT-PARENT =<&GPIO1>;
中断=<23 IRQ_TYPE_LEVEL_HIGH>;
};
};
&EDMA{
TI、EDMA-Xbar-event-map =/bits/ 16 <1 30
2 31>;
};
图3 (&U){
//status ="可以";
状态="已禁用";
pinctrl-names ="默认";
PINCCTRL-0 =<&uart3_PINS>;
};
&USB2_phy1{
//status ="可以";
状态="已禁用";
};
&USB1{
dr_mode ="外设";
//status ="可以";
状态="已禁用";
};
&USB2_phy2{
//status ="可以";
状态="已禁用";
};
uart0{
状态="可以";
};
&USB2{
dr_mode ="主机";
//status ="可以";
状态="已禁用";
};
&Mac{
从器件=<1>;
pinctrl-names ="默认"、"睡眠";
pinctrl-0 =<&cpsw_default>;
pinctrl-1 =<&cpsw_sleep>
状态="可以";
};
&Davinci_MDIO{
pinctrl-names ="默认"、"睡眠";
pinctrl-0 =<&davinci_mdio_default>;
pinctrl-1 =<&Davinci_MDIO_sleep>
// status ="确定";
状态="已禁用";
ethphy0:以太网-phy@0{
寄存器=<0>;
};
};
&cpsw_emac0{
PHY-Handle =<ðphy0>;
PHY 模式="RGMII";
};
elm (&E){
//status ="可以";
状态="已禁用";
};
&GPMC{
状态="可以";
pinctrl-names ="默认";
pinctrl-0 =<&nand_flash_x8>;
范围=<0 0 0 0x01000000>;/*最小 GPMC 分区= 16MB */
NAND@0、0{
REG =<0 0 4>;/*器件 IO 寄存器*/
ti、nand-ecc-opt ="bch16";
ti、elm-id =<&elm>;
NAND 总线宽度=<8>;
GPMC、器件宽度=<1>;
GPMC、SYNC-clk-ps =<0>;
GPMC、CS-ON-ns =<0>;
GPMC、cs-rd-off-ns =<40>;
GPMC、CS-power-off-ns =<40>;
GPMC、ADV-on-ns =<0>;
GPMC、ADV-rd-off-ns =<25>;
GPMC、ADV-power-off-ns =<25>;
GPMC、WE-ON-ns =<0>;
GPMC、WE-OFF-ns =<20>;
GPMC、OE-ON-ns =<3>;
GPMC、OE-off-ns =<30>;
GPMC、access-ns =<30>;
GPMC、第周期 ns =<40>;
GPMC、电源周期 ns =<40>;
GPMC、等待引脚=<0>;
GPMC、总线周转-ns =<0>;
gpcs、cycle2cycle-delay-ns =<0>;
GPMC、clk-activation-ns =<0>;
GPMC、等待监控 ns =<0>;
gpcs、power-access-ns =<40>;
GPMC、wr-data-mux-bus-ns =<0>;
/* MTD 分区表*/
/*所有 SPL-*分区的大小均为最小长度
可以独立编程。 表示
* NAND 闪存这等于擦除块的大小*/
#address-Cells =<1>;
#size-cells =<1>;
分区@0{
标签="NAND.SPL";
REG =<0x00000000 0x00040000>;
};
分区@1{
标签="NAN.SPL.Backup1";
寄存器=<0x00040000 0x00040000>;
};
分区@2{
标签="NAN.SPL.Backup2";
寄存器=<0x00080000 0x00040000>;
};
分区@3{
标签="NAN.SPL.BACKUP3";
REG =<0x000c0000 0x00040000>;
};
分区@4{
标签="NAND.u-boot-spl-OS";
寄存器=<0x00100000 0x00080000>;
};
分区@5{
标签="NAD.u-boot";
REG =<0x00180000 0x0010000>;
};
分区@6 {
标签="NAD.u-boot-env";
REG =<0x00280000 0x00040000>;
};
分区@7{
标签="NAD.u-boot-env.Backup1";
REG =<0x002c0000 0x00040000>;
};
分区@8{
标签="NAND.kernel";
REG =<0x00300000 0x00700000>;
};
分区@9{
标签="NAND.文件系统";
REG =<0x00a00000 0x1f600000>;
};
};
};
&DSS{
//status ="可以";
状态="已禁用";
pinctrl-names ="默认";
PINCCTRL-0 =<&DSS_PINS>;
端口{
DPI_OUT:端点@0{
远程端点=<&LCD_IN>;
数据线路=<24>;
};
};
};
Dcan0{
pinctrl-names ="默认";
pinctrl-0 =<&dcan0_default>;
//status ="可以";
状态="已禁用";
};
Dcan1{
pinctrl-names ="默认";
pinctrl-0 =<&dcan1_default>
// status ="确定";
状态="已禁用";
};
vpfe0{
//status ="可以";
状态="已禁用";
pinctrl-names ="默认"、"睡眠";
pinctrl-0 =<&vpfe0_pins_default>;
pinctrl-1 =<&vpfe0_PINS_SLEEP>
端口{
vpfe0_EP:端点{
远程端点=(&ov2659_1>;
TI、AM437x-VPFE-interface =<0>;
总线宽度=<8>;
HSYNC-ACTIVE =<0>;
VSYNC-ACTIVE =<0>;
};
};
};
vpfe1{
//status ="可以";
状态="已禁用";
pinctrl-names ="默认"、"睡眠";
pinctrl-0 =<&vpfe1_pins_default>;
pinctrl-1 =<&vpfe1_PINS_SLEEP>
端口{
vpfe1_EP:端点{
远程端点=(&ov2659_0>;
TI、AM437x-VPFE-interface =<0>;
总线宽度=<8>;
HSYNC-ACTIVE =<0>;
VSYNC-ACTIVE =<0>;
};
};
};
uart0{
u-boot、dm-spl;
};
mmc1{
u-boot、dm-spl;
};
&Mac{
u-boot、dm-spl;
};
&Davinci_MDIO{
u-boot、dm-spl;
};
&cpsw_emac0{
u-boot、dm-spl;
};
&PHY_SEL{
u-boot、dm-spl;
};
i2c0{
u-boot、dm-spl;
};
&L4_wkup{
u-boot、dm-spl;
};
&SCM{
u-boot、dm-spl;
};
&scm_conf{
u-boot、dm-spl;
};
ðphy0{
u-boot、dm-spl;
};
/*
*版权所有(C) 2013德州仪器公司- http://www.ti.com/
*
*本程序是自由软件;您可以重新分发和/或修改它
*根据 GNU 通用公共许可证第2版 AS 的条款
*由自由软件基金会发行。
*/
/* AM437x GP EVM */
/dts-v1/;
#include "am4372.dtsi"
#include "am4372-u-boot.dtsi"
#include
#include
#include
/{
模型="TI AM437x ETH";
兼容="ti、AM437x-gp-evm"、"ti、am4372"、"ti、am43";
OCP{
u-boot、dm-spl;
};
别名{
display0 =&lcd0;
serial3 =&uart3;
};
选择了{
stdout-path =&uart0;
节拍定时器=&timer2;
};
vmmcsd_fixed:fixedregulator-sd{
兼容="固定稳压器";
稳压器名称="vmmcsd_fixed";
稳压器最小微伏=<3300000>;
稳压器最大微伏=<3300000>;
高电平有效使能;
状态="可以";
};
VTT_FIXED:FixedRegulator-VTT{
兼容="固定稳压器";
稳压器名称="VTT_FIXED";
稳压器最小微伏=<1500000>;
稳压器最大微伏=<1500000>;
稳压器始终开启;
稳压器引导开启;
高电平有效使能;
GPIO =<&GPIO5 7 GPIO_ACTIVE_HIGH>;
状态="已禁用";
};
vmmcwl_fixed:fixedregulator-mmcwl{
兼容="固定稳压器";
稳压器名称="vmmcwl_fixed";
稳压器最小微伏=<1800000>;
稳压器最大微伏电压=<1800000>;
GPIO =<&GPIO1 20 GPIO_ACTIVE_HIGH>;
高电平有效使能;
状态="已禁用";
};
背光{
兼容="PWM 背光";
PWM =<&ecap0 0 50000 PWM_POLARY_INVERRIDE>;
亮度级别=<0 51 53 56 62 75 101 152 255>;
default-brightness 级别=<8>;
状态="已禁用";//PG
};
Matrix 键盘:Matrix 键盘@0{
兼容="GPIO-MATRY-KEYPAD ";
去抖-延迟-ms =<5>;
COL-SCAN-DELAY-us =<2>;
状态="已禁用";//PG
ROW-GPIO =<&GPIO3 21 GPIO_ACTIVE_HIGH /*组3、引脚21 */
&GPIO4 3 GPIO_ACTIVE_HIGH /*组4、引脚3 */
&GPIO4 2 GPIO_ACTIVE_HIGH>;/* Bank4、PIN2 */
COL-GPIO =<&GPIO3 19 GPIO_ACTIVE_HIGH /*组3,引脚19 */
&GPIO3 20 GPIO_ACTIVE_HIGH>;/*组3、引脚20 */
Linux、keymap =<0x00000201 /* P1 */
0x00010202 /* P2 */
0x01000067 /*向上*/
0x0101006a /*右*/
0x02000069 /*左*/
0x0201006c>;/*向下*/
};
lcd0:显示{
兼容="osdlisks、osd057T0559-34ts"、"panel-dpi";
标签="LCD";
pinctrl-names ="默认";
PINCCTRL-0 =<&LCD_PINS>;
状态="已禁用";//PG
/*
* SelLCDorHDMI、低电平可选择 HDMI。 但事实并非如此
*面板启用 GPIO ,但我们没有 HDMI 驱动程序支持也没有
*支持在两个显示器之间切换,所以使用这个 GPIO 作为
面板的启用应该是安全的。
*/
ENABLE-GPIO =<&GPIO5 8 GPIO_ACTIVE_HIGH>;
面板定时{
时钟频率=<33000000>;
Hactive =<800>;
vactive =<480>;
前沿=<210>;
后沿=<16>;
HSYNC-LEN =<30>;
vback-scale =<10>;
v前沿=<22>;
vsync-len =<13>;
HSYNC-ACTIVE =<0>;
VSYNC-ACTIVE =<0>;
无效=<1>;
像素时钟主动=<1>;
};
端口{
LCD_IN:端点{
远程端点=<&dpi_out>;
};
};
};
/*固定12MHz 振荡器*/
REFCLK:振荡器{
#clock-cells =<0>;
兼容="固定时钟";
时钟频率=<12000000>
};
};
uart0{
pinctrl-names ="默认";
PINCCTRL-0 =<&uart0_PINS>;
状态="可以";
};
&am43xx_pinmux{
pinctrl-names ="默认"、"睡眠";
pinctrl-0 =<&wlan_pins_default>;
PINCCTRL-1 =<&WLAN_PINS_SLEEP>;
i2c0_pins:i2c0_pins{
PINCCTRL-SINGLE、PINS =<
0x188 (PIN_INPUT_PULLUP | SLEWCTRL_FAST | MUX_MODE0)/* i2c0_sda.i2c0_sda */
0x18c (PIN_INPUT_PULLUP | SLEWCTRL_FAST | MUX_MODE0)/* i2c0_SCL.i2c0_SCL */
>;
};
i2c1_pins:i2c1_pins{
PINCCTRL-SINGLE、PINS =<
// 0x15c (PIN_INPUT_PULLUP | SLEWCTRL_FAST | MUX_MODE2)
// 0x158 (PIN_INPUT_PULLUP | SLEWCTRL_FAST | MUX_MODE2)
>;
};
mmc1_pins:pinmux_mmc1_pins{
PINCCTRL-SINGLE、PINS =<
//0x160 (PIN_INPUT | MUX_MODE7)/* spi0_CS1.GPIO0_6 */
0x234 (PIN_INPUT_PULLUP | MUX_MODE7)
>;
};
ecap0_pins:backlight_pins{
PINCCTRL-SINGLE、PINS =<
// 0x164 MUX_MODE0 /* eCAP0_IN_PWM0_OUT.eCAP0_IN_PWM0_OUT MODE0 */
>;
};
uart0_pins:pinmux_uart0_pins{
PINCCTRL-SINGLE、PINS =<
0x170 (PIN_INPUT | MUX_MODE0)/* uart0_RxD.uart0_RxD */
0x174 (PIN_OUTPUT | MUX_MODE0)/* uart0_TXD.uart0_TXD */
>;
};
pixcir_ts_pins:pixcir_ts_pins{
PINCCTRL-SINGLE、PINS =<
// 0x264 (PIN_INPUT_PULLUP | MUX_MODE7)/* SPI2_d0.GPIO3_22 */
>;
};
cpsw_default:cpsw_default{
PINCCTRL-SINGLE、PINS =<
/*从器件1 */
// 0x114 (PIN_OUTPUT_PULLDDOWN | MUX_MODE2)/* mii1_txen.rgmii1_txen */
// 0x118 (PIN_INPUT_PULLDDOWN | MUX_MODE2)/* mii1_rxdv.rgmii1_rxctl */
// 0x11c (PIN_OUTPUT_PULLDDOWN | MUX_MODE2)/* mii1_txd1.rgmii1_txd3 */
// 0x120 (PIN_OUTPUT_PULLDDOWN | MUX_MODE2)/* mii1_txd0.rgmii1_txd2 */
// 0x124 (PIN_OUTPUT_PULLDDOWN | MUX_MODE2)/* mii1_txd1.rgmii1_txd1 */
// 0x128 (PIN_OUTPUT_PULLDDOWN | MUX_MODE2)/* mii1_txd0.rgmii1_txd0 */
// 0x12c (PIN_OUTPUT_PULLDDOWN | MUX_MODE2)/* mii1_txclk.rmii1_tclk */
// 0x130 (PIN_INPUT_PULLDOWN | MUX_MODE2)/* mii1_rxclk.rmii1_RCLK */
// 0x134 (PIN_INPUT_PULLDDOWN | MUX_MODE2)/* mii1_rxd1.rgmii1_rxd3 */
// 0x138 (PIN_INPUT_PULLDDOWN | MUX_MODE2)/* mii1_rxd0.rgmii1_rxd2 */
// 0x13c (PIN_INPUT_PULLDOWN | MUX_MODE2)/* mii1_rxd1.rgmii1_rxd1 */
// 0x140 (PIN_INPUT_PULLDOWN | MUX_MODE2)/* mii1_rxd0.rgmii1_rxd0 */
>;
};
cpsw_sleep:cpsw_sleep{
PINCCTRL-SINGLE、PINS =<
/*从器件1复位值*/
// 0x114 (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x118 (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x11c (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x120 (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x124 (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x128 (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x12c (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x130 (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x134 (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x138 (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x13c (PIN_INPUT_PULLUP | MUX_MODE7)
// 0x140 (PIN_INPUT_PULLUP | MUX_MODE7)
>;
};
davinci_mdio_default:davinci_mdio_default{
PINCCTRL-SINGLE、PINS =<
/* MDIO */
// 0x148 (PIN_INPUT_PULLUP | SLEWCTRL_FAST | MUX_MODE0)/* MDIO_DATA.mDIO_DATA */
// 0x14c (PIN_OUTPUT_PULLUP | MUX_MODE0)/* MDIO_clk.mdio_clk */
>;
};
Davinci_MDIO_sleep:davinci_MDIO_sleep{
PINCCTRL-SINGLE、PINS =<
/* MDIO 复位值*/
//0x148 (PIN_INPUT_PULLUP | MUX_MODE7)
//0x14c (PIN_INPUT_PULLUP | MUX_MODE7)
>;
};
NAN_FLASH_x8:NAN_FLASH_x8{
PINCCTRL-SINGLE、PINS =<
0x26c (PIN_OUTPUT_PULLDDOWN | MUX_MODE7)/* SPI2_cs0.GPIO/eMMCorNANDSel */
0x0 (PIN_INPUT | MUX_MODE0)/* GPMC_ad0.GPMC_ad0 */
0x4 (PIN_INPUT | MUX_MODE0)/* GPMC_ad1.GPMC_ad1 */
0x8 (PIN_INPUT | MUX_MODE0)/* GPMC_ad2.GPMC_ad2 */
0xc (PIN_INPUT | MUX_MODE0)/* GPMC_ad3.GPMC_ad3 */
0x10 (PIN_INPUT | MUX_MODE0)/* GPMC_AD4.GPMC_AD4 */
0x14 (PIN_INPUT | MUX_MODE0)/* GPMC_ad5.GPMC_ad5 */
0x18 (PIN_INPUT | MUX_MODE0)/* GPMC_ad6.GPMC_ad6 */
0x1c (PIN_INPUT | MUX_MODE0)/* GPMC_AD7.GPMC_AD7 */
0x70 (PIN_INPUT_PULLUP | MUX_MODE0)/* GPMC_wait0.GPMC_wait0 */
0x74 (PIN_OUTPUT_PULLUP | MUX_MODE7)/* GPMC_WPN.GPMC_WPN */
0x7c (PIN_OUTPUT | MUX_MODE0)/* GPMC_csn0.GPMC_csn0 */
0x90 (PIN_OUTPUT | MUX_MODE0)/* gps_advn_ale.gps_advn_ale */
0x94 (PIN_OUTPUT | MUX_MODE0)/* gps_oen_ren.gps_oen_ren */
0x98 (PIN_OUTPUT | MUX_MODE0)/* gps_wen.gps_wen */
0x9C (PIN_OUTPUT | MUX_MODE0)/* GPMC_Be0n_cle.GPMC_Be0n_cle */
>;
};
DSS_PINS:DSS_PINS{
PINCCTRL-SINGLE、PINS =<
0x020 (PIN_OUTPUT_PULLUP | MUX_MODE1)/* GPMC AD 8 -> DSS 数据23 */
0x024 (PIN_OUTPUT_PULLUP | MUX_MODE1)
0x028 (PIN_OUTPUT_PULLUP | MUX_MODE1)
0x02c (PIN_OUTPUT_PULLUP | MUX_MODE1)
0x030 (PIN_OUTPUT_PULLUP | MUX_MODE1)
0x034 (PIN_OUTPUT_PULLUP | MUX_MODE1)
0x038 (PIN_OUTPUT_PULLUP | MUX_MODE1)
0x03c (PIN_OUTPUT_PULLUP | MUX_MODE1)/* GPMC AD 15 -> DSS 数据16 */
0x0a0 (PIN_OUTPUT_PULLUP | MUX_MODE0)/* DSS DATA 0 */
0x0a4 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0a8 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0ac (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0b0 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0b4 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0b8 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0bc (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0c0 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0c4 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0c8 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0cc (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0d0 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0d4 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0d8 (PIN_OUTPUT_PULLUP | MUX_MODE0)
0x0dc (PIN_OUTPUT_PULLUP | MUX_MODE0)/* DSS 数据15 */
0x0e0 (PIN_OUTPUT_PULLUP | MUX_MODE0)/* DSS VSYNC */
0x0e4 (PIN_OUTPUT_PULLUP | MUX_MODE0)/* DSS HSYNC */
0x0e8 (PIN_OUTPUT_PULLUP | MUX_MODE0)/* DSS PCLK */
0x0ec (PIN_OUTPUT_PULLUP | MUX_MODE0)/* DSS AC BIAS EN */
>;
};
LCD_pins:LCD_pins{
PINCCTRL-SINGLE、PINS =<
/* GPIO 5_8以选择 LCD / HDMI */
//0x238 (PIN_OUTPUT_PULLUP | MUX_MODE7)
>;
};
dcan0_default:dcan0_default_pins{
PINCCTRL-SINGLE、PINS =<
//0x178 (PIN_OUTPUT | MUX_MODE2)/* uart1_CTSN.d_CAN0_TX */
//0x17c (PIN_INPUT_PULLUP | MUX_MODE2)/* uart1_rtsn.d_CAN0_Rx */
>;
};
dcan1_default:dcan1_default_pins{
PINCCTRL-SINGLE、PINS =<
//0x180 (PIN_OUTPUT | MUX_MODE2)/* uart1_RXD.d_CAN1_TX */
//0x184 (PIN_INPUT_PULLUP | MUX_MODE2)/* uart1_TXD.D_CAN1_Rx */
>;
};
vpfe0_PINS_DEFAULT:vpfe0_PINS_DEFAULT{
PINCCTRL-SINGLE、PINS =<
//0x1B0 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM0_HD 模式0*/
//0x1B4 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM0_VD 模式0*/
// 0x1C0 (PIN_INPUT_PULLUP | MUX_MODE0)/* cam0_pclk mode 0*/
// 0x1C4 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM0_DATA8 MODE 0*/
// 0x1C8 (PIN_INPUT_PULLUP | MUX_MODE0)/* cam0_data9 mode 0*/
// 0x208 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM0_DATA0模式0*/
// 0x20C (PIN_INPUT_PULLUP | MUX_MODE0)/* cam0_data1 mode 0*/
// 0x210 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM0_DATA2 MODE 0*/
// 0x214 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM0_DATA3模式0*/
// 0x218 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM0_DATA4模式0*/
// 0x21C (PIN_INPUT_PULLUP | MUX_MODE0)/* cam0_data5 mode 0*/
// 0x220 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM0_DATA6 MODE 0*/
// 0x224 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM0_DATA7模式0*/
>;
};
vpfe0_PINS_SLEEP:vpfe0_PINS_SLEEP{
PINCCTRL-SINGLE、PINS =<
// 0x1B0 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM0_HD MODE 0*/
// 0x1B4 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM0_VD mode 0*/
// 0x1C0 (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* cam0_pclk mode 0*/
// 0x1C4 (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* cam0_data8 mode 0*/
// 0x1C8 (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* cam0_data9 mode 0*/
// 0x208 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM0_DATA0 MODE 0*/
// 0x20C (DS0_pull_up_down_EN | input_EN | MUX_MODE7)/* cam0_data1 mode 0*/
// 0x210 (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* cam0_data2 mode 0*/
// 0x214 (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* cam0_data3 mode 0*/
// 0x218 (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* cam0_data4 mode 0*/
// 0x21C (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* cam0_data5 mode 0*/
// 0x220 (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* cam0_data6 mode 0*/
// 0x224 (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* cam0_data7 mode 0*/
>;
};
vpfe1_pins_default:vpfe1_pins_default{
PINCCTRL-SINGLE、PINS =<
// 0x1CC (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA9 MODE 0*/
// 0x1D0 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA8 MODE 0*/
// 0x1D4 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_HD MODE 0*/
// 0x1D8 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_VD MODE 0*/
// 0x1DC (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_pclk mode 0*/
// 0x1E8 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA0 MODE 0*/
// 0x1EC (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA1 MODE 0*/
// 0x1F0 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA2 MODE 0*/
// 0x1F4 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA3 MODE 0*/
// 0x1F8 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA4 MODE 0*/
// 0x1FC (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA5 MODE 0*/
// 0x200 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA6 MODE 0*/
// 0x204 (PIN_INPUT_PULLUP | MUX_MODE0)/* CAM1_DATA7 MODE 0*/
>;
};
vpfe1_pins_sleep:vpfe1_pins_sleep{
PINCCTRL-SINGLE、PINS =<
// 0x1CC (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA9 MODE 0*/
// 0x1D0 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA8 MODE 0*/
// 0x1D4 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_HD MODE 0*/
// 0x1D8 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_VD mode 0*/
// 0x1DC (DS0_pull_up_down_EN | INPUT_EN | MUX_MODE7)/* CAM1_pclk mode 0*/
// 0x1E8 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA0 MODE 0*/
// 0x1EC (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA1 MODE 0*/
// 0x1F0 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA2 MODE 0*/
// 0x1F4 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA3 MODE 0*/
// 0x1F8 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA4 MODE 0*/
// 0x1FC (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA5 MODE 0*/
// 0x200 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA6 MODE 0*/
// 0x204 (DS0_PULL_UP_DOWN_EN | INPUT_EN | MUX_MODE7)/* CAM1_DATA7 MODE 0*/
>;
};
mmc3_PINS_DEFAULT:pinmux_mmc3_PINS_DEFAULT{
PINCCTRL-SINGLE、PINS =<
// 0x8c (PIN_INPUT_PULLUP | MUX_MODE3)/* gps_clk.mmc2_clk */
// 0x88 (PIN_INPUT_PULLUP | MUX_MODE3)/* gps_csn3.mmc2_cmd */
// 0x44 (PIN_INPUT_PULLUP | MUX_MODE3)/* GPMC_A1.mmc2_dat0 */
// 0x48 (PIN_INPUT_PULLUP | MUX_MODE3)/* GPMC_A2.mmc2_DAT1 */
// 0x4c (PIN_INPUT_PULLUP | MUX_MODE3)/* GPMC_A3.mmc2_dat2 */
// 0x78 (PIN_INPUT_PULLUP | MUX_MODE3)/* gps_be1n.mmc2_dat3 */
>;
};
mmc3_PINS_SLEEP:pinmux_mmc3_PINS_SLEEP{
PINCCTRL-SINGLE、PINS =<
// 0x8c (PIN_INPUT_PULLUP | MUX_MODE7)/* gps_clk.mmc2_clk */
// 0x88 (PIN_INPUT_PULLUP | MUX_MODE7)/* gps_csn3.mmc2_cmd */
// 0x44 (PIN_INPUT_PULLUP | MUX_MODE7)/* GPMC_A1.mmc2_dat0 */
// 0x48 (PIN_INPUT_PULLUP | MUX_MODE7)/* gps_A2.mmc2_dat1 */
// 0x4c (PIN_INPUT_PULLUP | MUX_MODE7)/* GPMC_A3.mmc2_dat2 */
0x78 (PIN_INPUT_PULLDOWN | MUX_MODE7)/* GPMC_Be1n.mmc2_dat3 */
>;
};
WLAN_PINS_DEFAULT:pinmux_WLAN_PINS_DEFAULT{
PINCCTRL-SINGLE、PINS =<
// 0x50 (PIN_OUTPUT_PULLUP | MUX_MODE7)/* GPMC_A4.GPIO1_20 WL_EN */
// 0x5c (PIN_INPUT | WAKEUP_ENABLE | MUX_MODE7)/* GPMC_A7.GPIO1_23 WL_IRQ*/
// 0x40 (PIN_OUTPUT_PULLUP | MUX_MODE7 )/* GPMC_a0.GPIO1_16 BT_EN*/
>;
};
WLAN_PINS_SLEEP:pinmux_WLAN_PINS_SLEEP{
PINCCTRL-SINGLE、PINS =<
// 0x50 (PIN_OUTPUT_PULLUP | MUX_MODE7)/* GPMC_A4.GPIO1_20 WL_EN */
// 0x5c (PIN_INPUT | WAKEUP_ENABLE | MUX_MODE7)/* GPMC_A7.GPIO1_23 WL_IRQ*/
// 0x40 (PIN_OUTPUT_PULLUP | MUX_MODE7)/* GPMC_a0.GPIO1_16 BT_EN*/
>;
};
uart3_pins:uart3_pins{
PINCCTRL-SINGLE、PINS =<
// 0x228 (PIN_INPUT | MUX_MODE0)/* uart3_RxD.uart3_RxD */
// 0x22c (PIN_OUTPUT_PULLDDOWN | MUX_MODE0)/* uart3_TXD.uart3_TXD */
// 0x230 (PIN_INPUT_PULLUP | MUX_MODE0)/* uart3_CTSN.uart3_CTSN */
// 0x234 (PIN_OUTPUT_PULLDDOWN | MUX_MODE0)/* uart3_rtsn.uart3_rtsn */
>;
};
};
i2c0{
状态="可以";
pinctrl-names ="默认";
pinctrl-0 =<&i2c0_pins>;
时钟频率=<100000>;
tps65218:tps65218@24 {
寄存器=<0x24>;
兼容="ti、tps65218";
中断= ;/* nMIN */
中断控制器;
#interrupt-cells =<2>;
dcdcdc1:稳压器-dcdcdc1{
兼容="ti、tps65218-dc1";
稳压器名称="VDD_CORE";
稳压器最小微伏=<912000>;
稳压器最大微伏=<1144000>;
稳压器引导开启;
稳压器始终开启;
};
dcdcdc2:稳压器-dcdcdc2{
兼容="ti、tps65218-dc2";
稳压器名称="VDD_MPU";
稳压器最小微伏=<912000>;
稳压器最大微伏值=<1378000>;
稳压器引导开启;
稳压器始终开启;
};
dcdc3:稳压器- dcdc3 {
兼容="ti、tps65218-dc3";
稳压器名称="vdcdc3";
稳压器最小微伏=<1500000>;
稳压器最大微伏=<1500000>;
稳压器引导开启;
稳压器始终开启;
};
dcdc5:稳压器- dcdc5{
兼容="ti、tps65218-dc5";
稳压器名称="v1_0bat";
稳压器最小微伏=<1000000>;
稳压器最大微伏=<1000000>;
};
dcdcdc6:稳压器-dcdcdc6{
兼容="ti、tps65218-dc6";
稳压器名称="v1_8bat";
稳压器最小微伏=<1800000>;
稳压器最大微伏电压=<1800000>;
};
ldo1:调节器-ldo1{
兼容="ti、tps65218-ldo1";
稳压器最小微伏=<1800000>;
稳压器最大微伏电压=<1800000>;
稳压器引导开启;
稳压器始终开启;
};
};
ov2659@30{
兼容="ovti、ov2659";
寄存器=<0x30>;
Clocks =<&REFCLK 0>;
时钟名称="xvclk";
端口{
ov2659_0:端点{
远程端点=<&vpfe1_EP>;
链路频率=/bits/64 <70000000>;
};
};
};
};
i2c1{
状态="已禁用";//确定
pinctrl-names ="默认";
pinctrl-0 =<&i2c1_pins>;
pixcir_ts@5c{
兼容="pixcir,pixcir_tangoc";
pinctrl-names ="默认";
pinctrl-0 =<&pixcir_ts_pins>;
reg =<0x5c>;
INTERRUPT-PARENT =<&GPIO3>;
中断=<22 0>;
ATB-GPIO =<&GPIO3 22 GPIO_ACTIVE_HIGH>;
触摸屏大小 x =<1024>;
触摸屏大小-y =<600>;
};
ov2659@30{
兼容="ovti、ov2659";
寄存器=<0x30>;
状态="已禁用";//PG
Clocks =<&REFCLK 0>;
时钟名称="xvclk";
端口{
ov2659_1:端点{
远程端点=<&vpfe0_EP>;
链路频率=/bits/64 <70000000>;
};
};
};
};
&epwmss0{
// status ="可以";//页
状态="已禁用";
};
tscadc (&T){
//status ="可以";
状态="已禁用";
ADC{
TI、ADC-CHANNELS =<0 1 2 3 4 5 6 7>;
};
};
ecap0{
//status ="可以";
状态="已禁用";
pinctrl-names ="默认";
pinctrl-0 =<&ecap0_pins>;
};
GPIO0{
状态="可以";
};
GPIO1{(&G)}
状态="可以";
};
&GPIO3{
状态="可以";
};
GPIO4{(&G)}
状态="可以";
};
GPIO5{
状态="可以";
ti、no-reset-on-init;
};
mmc1{
状态="可以";
VMMC-supply =<&vmmcsd_fixed>;//<&dcdc3>;
总线宽度=<4>;
pinctrl-names ="默认";
pinctrl-0 =<&mmc1_pins>;
//Broched-CD;
// CD-GPIO =<&GPIO0 6 GPIO_ACTIVE_LOW>;
CD-GPIO =<&GPIO5 1 GPIO_ACTIVE_LOW>;
};
&mmc3{
/*禁用 MMC3、因为 U-Boot 中不支持 SDIO */
状态="已禁用";
/*这些示例位于横梁上,在中进行了概述
xbar-event-map 元素*/
DMA =<& EDMA 30
&EDMA 31>;
dma-names ="tx"、"Rx";
VMMC-SUPPLY =<&vmmcwl_fixed>
总线宽度=<4>;
pinctrl-names ="默认"、"睡眠";
pinctrl-0 =<&mmc3_PINS_DEFAULT>;
pinctrl-1 =<&mmc3_PINS_SLEEP>;
CAP-Power-Off-Card;
保持电源在暂停状态;
TI、不可拆卸;
#address-Cells =<1>;
#size-cells =<0>;
wlcore:wlcore@0{
兼容="ti、wl1835";
寄存器=<2>;
INTERRUPT-PARENT =<&GPIO1>;
中断=<23 IRQ_TYPE_LEVEL_HIGH>;
};
};
&EDMA{
TI、EDMA-Xbar-event-map =/bits/ 16 <1 30
2 31>;
};
图3 (&U){
//status ="可以";
状态="已禁用";
pinctrl-names ="默认";
PINCCTRL-0 =<&uart3_PINS>;
};
&USB2_phy1{
//status ="可以";
状态="已禁用";
};
&USB1{
dr_mode ="外设";
//status ="可以";
状态="已禁用";
};
&USB2_phy2{
//status ="可以";
状态="已禁用";
};
uart0{
状态="可以";
};
&USB2{
dr_mode ="主机";
//status ="可以";
状态="已禁用";
};
&Mac{
从器件=<1>;
pinctrl-names ="默认"、"睡眠";
pinctrl-0 =<&cpsw_default>;
pinctrl-1 =<&cpsw_sleep>
状态="可以";
};
&Davinci_MDIO{
pinctrl-names ="默认"、"睡眠";
pinctrl-0 =<&davinci_mdio_default>;
pinctrl-1 =<&Davinci_MDIO_sleep>
// status ="确定";
状态="已禁用";
ethphy0:以太网-phy@0{
寄存器=<0>;
};
};
&cpsw_emac0{
PHY-Handle =<ðphy0>;
PHY 模式="RGMII";
};
elm (&E){
//status ="可以";
状态="已禁用";
};
&GPMC{
状态="可以";
pinctrl-names ="默认";
pinctrl-0 =<&nand_flash_x8>;
范围=<0 0 0 0x01000000>;/*最小 GPMC 分区= 16MB */
NAND@0、0{
REG =<0 0 4>;/*器件 IO 寄存器*/
ti、nand-ecc-opt ="bch16";
ti、elm-id =<&elm>;
NAND 总线宽度=<8>;
GPMC、器件宽度=<1>;
GPMC、SYNC-clk-ps =<0>;
GPMC、CS-ON-ns =<0>;
GPMC、cs-rd-off-ns =<40>;
GPMC、CS-power-off-ns =<40>;
GPMC、ADV-on-ns =<0>;
GPMC、ADV-rd-off-ns =<25>;
GPMC、ADV-power-off-ns =<25>;
GPMC、WE-ON-ns =<0>;
GPMC、WE-OFF-ns =<20>;
GPMC、OE-ON-ns =<3>;
GPMC、OE-off-ns =<30>;
GPMC、access-ns =<30>;
GPMC、第周期 ns =<40>;
GPMC、电源周期 ns =<40>;
GPMC、等待引脚=<0>;
GPMC、总线周转-ns =<0>;
gpcs、cycle2cycle-delay-ns =<0>;
GPMC、clk-activation-ns =<0>;
GPMC、等待监控 ns =<0>;
gpcs、power-access-ns =<40>;
GPMC、wr-data-mux-bus-ns =<0>;
/* MTD 分区表*/
/*所有 SPL-*分区的大小均为最小长度
可以独立编程。 表示
* NAND 闪存这等于擦除块的大小*/
#address-Cells =<1>;
#size-cells =<1>;
分区@0{
标签="NAND.SPL";
REG =<0x00000000 0x00040000>;
};
分区@1{
标签="NAN.SPL.Backup1";
寄存器=<0x00040000 0x00040000>;
};
分区@2{
标签="NAN.SPL.Backup2";
寄存器=<0x00080000 0x00040000>;
};
分区@3{
标签="NAN.SPL.BACKUP3";
REG =<0x000c0000 0x00040000>;
};
分区@4{
标签="NAND.u-boot-spl-OS";
寄存器=<0x00100000 0x00080000>;
};
分区@5{
标签="NAD.u-boot";
REG =<0x00180000 0x0010000>;
};
分区@6 {
标签="NAD.u-boot-env";
REG =<0x00280000 0x00040000>;
};
分区@7{
标签="NAD.u-boot-env.Backup1";
REG =<0x002c0000 0x00040000>;
};
分区@8{
标签="NAND.kernel";
REG =<0x00300000 0x00700000>;
};
分区@9{
标签="NAND.文件系统";
REG =<0x00a00000 0x1f600000>;
};
};
};
&DSS{
//status ="可以";
状态="已禁用";
pinctrl-names ="默认";
PINCCTRL-0 =<&DSS_PINS>;
端口{
DPI_OUT:端点@0{
远程端点=<&LCD_IN>;
数据线路=<24>;
};
};
};
Dcan0{
pinctrl-names ="默认";
pinctrl-0 =<&dcan0_default>;
//status ="可以";
状态="已禁用";
};
Dcan1{
pinctrl-names ="默认";
pinctrl-0 =<&dcan1_default>
// status ="确定";
状态="已禁用";
};
vpfe0{
//status ="可以";
状态="已禁用";
pinctrl-names ="默认"、"睡眠";
pinctrl-0 =<&vpfe0_pins_default>;
pinctrl-1 =<&vpfe0_PINS_SLEEP>
端口{
vpfe0_EP:端点{
远程端点=(&ov2659_1>;
TI、AM437x-VPFE-interface =<0>;
总线宽度=<8>;
HSYNC-ACTIVE =<0>;
VSYNC-ACTIVE =<0>;
};
};
};
vpfe1{
//status ="可以";
状态="已禁用";
pinctrl-names ="默认"、"睡眠";
pinctrl-0 =<&vpfe1_pins_default>;
pinctrl-1 =<&vpfe1_PINS_SLEEP>
端口{
vpfe1_EP:端点{
远程端点=(&ov2659_0>;
TI、AM437x-VPFE-interface =<0>;
总线宽度=<8>;
HSYNC-ACTIVE =<0>;
VSYNC-ACTIVE =<0>;
};
};
};
uart0{
u-boot、dm-spl;
};
mmc1{
u-boot、dm-spl;
};
&Mac{
u-boot、dm-spl;
};
&Davinci_MDIO{
u-boot、dm-spl;
};
&cpsw_emac0{
u-boot、dm-spl;
};
&PHY_SEL{
u-boot、dm-spl;
};
i2c0{
u-boot、dm-spl;
};
&L4_wkup{
u-boot、dm-spl;
};
&SCM{
u-boot、dm-spl;
};
&scm_conf{
u-boot、dm-spl;
};
ðphy0{
u-boot、dm-spl;
};
随附原理图和 DTS 文件和屏幕截图、供您参考。您能帮助我解决这个问题吗?